
机器人设计,如何选择电机?续机器人设计,如何选择电机?续
贸泽电子(续上半部分,介绍机器人用电机的开发和选择技巧)
但是使用高级算法可以更好的控制马达,比如在电机控制器中嵌入PID(比例 - 积分 - 微分)或FOC(磁场定向控制,有时也
被称为矢量控制)。此所需电机操作匹配实际的负载和负载变化,提供增强的、更精确的性能。例如,马达控制算法/程序事
关转子惯性,并相应地调整电机驱动,从而降低因机械问题导致的故障。使用定制算法能够使加速和扭矩控制地更精确。
相较于有刷电机,无刷电机(BLDC)需要更复杂的电子控制装置,但也提供更佳性能。 BLDC电机通常需要通过霍尔效应传
感器、光学编码器或者通过检测反电动势来进行位置反馈。
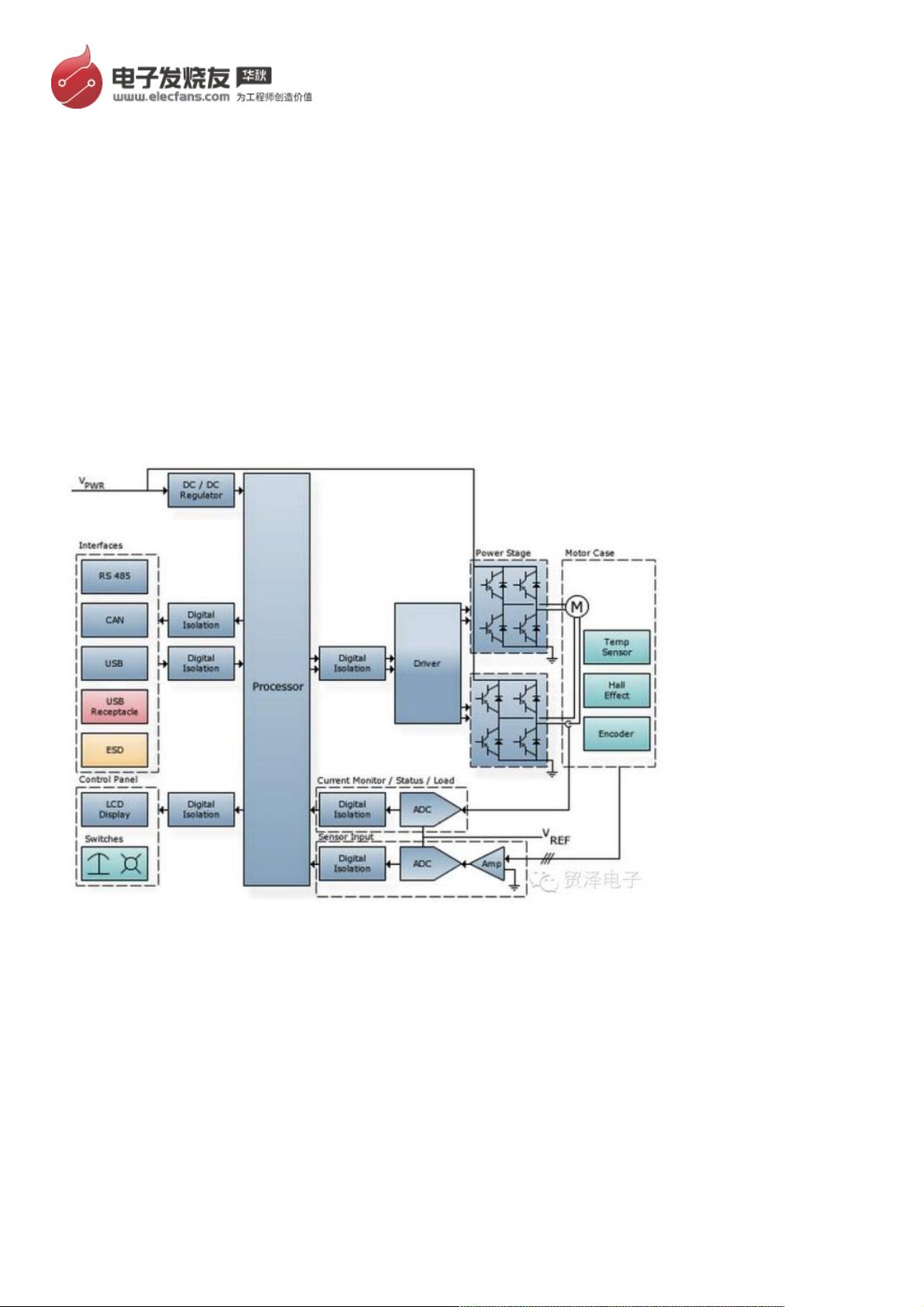
机器人中的BLDC电机中经常使用的一种类型是步进电机(图3),它采用中心芯周围的永磁体环来切换电磁场。步进电机并
不是传统意义上的“旋转”;相反,步进轴可以以有限的、一步一步的增量(步骤)方式移动,所以,除连续旋转外,可以仅移动
完整旋转的一小部分。步进电机具备完全可重复的运动控制;通过指令控制,步进轴可以返回到它之前所在的某个具体位置。
“步”的角度通常可以小到1.8⁰,其中360⁰(一转)产生约200步的动作。30⁰的步进角转一圈共需12步(12×30= 360)。步进
角或每转的步数取决于电机具有的永久磁铁数量,但更高或更低值也是可以的。
图
3
:包含所有部件的步进电机框图。
MOSFETS
位于功率级。
在步进电机中,如果电源位于的“连通”状态,但没有步进指示,它们将维持原有位置。步进电机可以在低转速下提供高扭矩。
使步进轴移动的最直接方式是按序开关电磁铁,但可能会导致颤动或振动。
无刷直流电机和步进电机之间存在重叠的应用类型。步进电机更适合于要求精确往复运动的应用,如拾取和放置,而不适合长
时间的连续转动,以及一些较小型应用,不需要电机提供高转矩或速度。另外,步进电机能效表现上不如无刷直流电机。
还有许多其它电机选项。电机族谱树很长而且复杂,还有许多孪生兄弟姐妹。例如,永磁同步电机(PMSM)是无刷直流电动
机(相对于转子)和AC感应电机(相对于定子结构)的组合。它封装较小,却具备高效率,高转矩/重量比,快速响应时间,
并且容易控制的优势,但成本也高。
控制要求精度
机器人运动系统不仅仅是一个电机;它包括三个主要功能块:
1.实时控制器,它有以下三种实现方式:
o一个通用的、计算速度快的处理器,运行运动控制固件
o一个DSP型的FPGA,可编程为控制类应用
o一个专用控制器IC,使用硬连线嵌入式算法。
2.一个或多级串联驱动器,从控制器输出获取低电平信号,并向控制器输出电子开关所需高电压/电流的信号。
3.MOSFET(或其它的开关元件,例如IGBT或双极晶体管),它实际上控制到电机绕组的电流流动。
1

weixin_38558623
- 粉丝: 4
- 资源: 930
 我的内容管理
收起
我的内容管理
收起
- 我的资源
快来上传第一个资源
 我的收益 登录查看自己的收益
我的收益 登录查看自己的收益 我的积分
登录查看自己的积分
我的积分
登录查看自己的积分
 我的C币
登录后查看C币余额
我的C币
登录后查看C币余额
 我的收藏
我的收藏  我的下载
我的下载  下载帮助
下载帮助

会员权益专享




最新资源
- VMP技术解析:Handle块优化与壳模板初始化
- C++ Primer 第四版更新:现代编程风格与标准库
- 计算机系统基础实验:缓冲区溢出攻击(Lab3)
- 中国结算网上业务平台:证券登记操作详解与常见问题
- FPGA驱动的五子棋博弈系统:加速与创新娱乐体验
- 多旋翼飞行器定点位置控制器设计实验
- 基于流量预测与潮汐效应的动态载频优化策略
- SQL练习:查询分析与高级操作
- 海底数据中心散热优化:从MATLAB到动态模拟
- 移动应用作业:MyDiaryBook - Google Material Design 日记APP
- Linux提权技术详解:从内核漏洞到Sudo配置错误
- 93分钟快速入门 LaTeX:从入门到实践
- 5G测试新挑战与罗德与施瓦茨解决方案
- EAS系统性能优化与故障诊断指南
- Java并发编程:JUC核心概念解析与应用
- 数据结构实验报告:基于不同存储结构的线性表和树实现
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


