UWB无线定位系统:原理、TOF测距与技术特点
"解析uwb无线定位系统的原理及主要技术特点"
在无线通信领域,超宽带(Ultra Wide-Band,简称UWB)技术以其独特的优点在无线定位系统中扮演着重要角色。UWB定义的核心在于其宽广的工作频谱,按照美国联邦通信委员会的规定,UWB的频带范围为3.1至10.6GHz,且系统带宽与中心频率的-10dB比值超过20%,或最小带宽达到500MHz。这种通信方式通常采用发射非常短暂(如2ns)的窄脉冲,如二次高斯脉冲,通过微分、混频等手段上变频至UWB频段,实现高效传输。
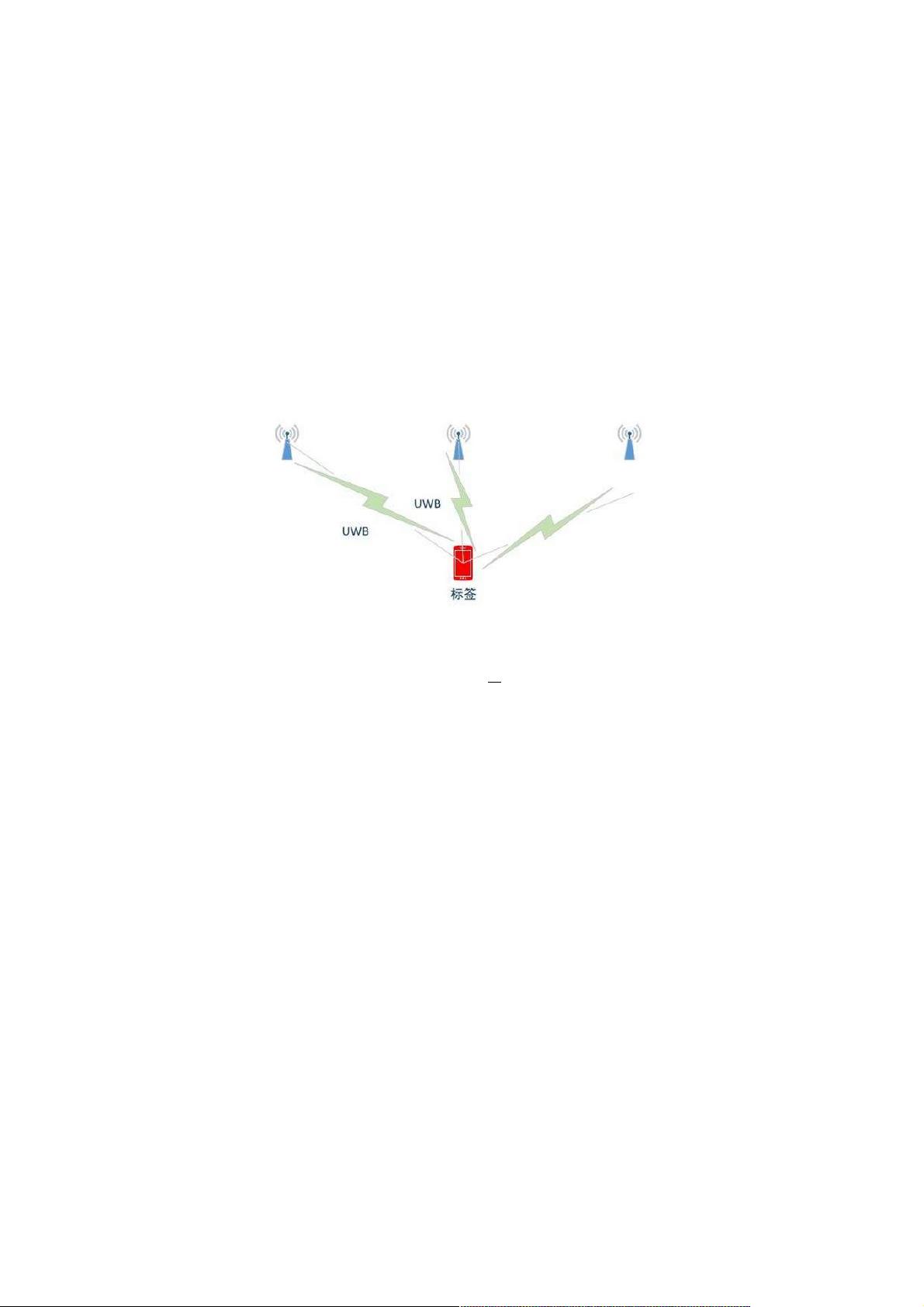
UWB定位原理主要依赖于TOF(Time Of Flight)技术,即信号从发射到接收的时间差。在定位过程中,UWB系统至少需要三个固定的定位节点(Anchor)和一个移动的目标节点(Tag)。这些Anchor相当于无线定位的参照点,它们与Tag之间的距离是通过测量信号的TOF来确定的。如同GPS定位系统,三个Anchor可以形成三维空间中的三角形,从而计算出Tag的精确位置。
UWB测距的基本流程是:Tag向Anchor发送一个包含时间戳的数据包,当Anchor接收到这个数据包后,如果两个节点已进行了时间同步,Anchor可以根据自身时间戳和接收到的时间戳计算出TOF,进而推算出距离。然而,实际环境中可能存在多种干扰因素,使得直接使用TOF测距的精度受到影响。
为了解决这个问题,Decawave公司采用了二次握手的方式来精确测量TOF。这是一种双向测距技术,信号在两个异步的收发器之间往返,通过这种方式,可以更准确地捕捉到信号的飞行时间,从而提高测距的精度。具体操作包括Tag和Anchor之间的交互过程,确保在测量过程中有效地排除干扰,实现高精度的定位。
UWB无线定位系统的核心在于其超宽带特性,以及利用TOF技术进行精确的测距。通过优化的通信协议和二次握手等策略,UWB能够提供厘米级别的定位精度,适用于室内导航、物联网设备跟踪、工业自动化等多种场景。随着技术的不断发展,UWB无线定位系统的应用前景将更加广阔。
解析解析uwb无线定位系统的原理及主要技术特点无线定位系统的原理及主要技术特点
UWB的定义超宽带(Ultra Wide-Band,UWB)是一种新型的无线通信技术,根据美国联邦通信委员会的规
范,UWB的工作频带为3.1~10.6GHz,系统-10dB带宽与系统中心频率之比大于20%或系统带宽至少为
500MHz。UWB信号的发生可通过发射时间极短(如2ns)的窄脉冲(如二次高斯脉冲)通过微分或混频等上变
频方式调制到UWB工作频段实现。UWB定位UWB是如何进行定位的,那么就需要使用一个东西叫做
TOF(Time Of Flight)翻译过来也就是光飞行的时间。UWB测距原理首先定义一下再定位中需要哪些东西,大
家都知道GPS需要三个卫星才能对移动设备完成定位,UWB定位中也是
UWB的定义的定义
超宽带(Ultra Wide-Band,UWB)是一种新型的无线通信技术,根据美国联邦通信委员会的规范,UWB的工作频带为
3.1~10.6GHz,系统-10dB带宽与系统中心频率之比大于20%或系统带宽至少为500MHz。UWB信号的发生可通过发射时间极
短(如2ns)的窄脉冲(如二次高斯脉冲)通过微分或混频等上变频方式调制到UWB工作频段实现。
UWB定位定位
UWB是如何进行定位的,那么就需要使用一个东西叫做TOF(Time Of Flight)翻译过来也就是光飞行的时间。
UWB测距原理测距原理
首先定义一下再定位中需要哪些东西,大家都知道GPS需要三个卫星才能对移动设备完成定位,UWB定位中也是一样,
我们需要固定三个UWB板卡,我们称这三个固定的UWB板卡为Anchor,然后称需要被定位的 处于移动状态的UWB板卡为
Tag。
Anchor 到 Tag 之间的就可以通过光的飞行时间来进行测量了,举个简单的例子, 一个Anchor 到一个Tag 的距离,可以
直接使用Tag发送一个带有时间戳的数据包,Anchor接收到数据包之后,如果Anchor和Tag已经经过时间同步的话,Anchor
根据本地时间和Tag发送时间包的时间戳的时间做差值,就能知道光飞行了多长时间,这样就能计算距离了,当然,这样会有
很大的干扰,导致测不准,所以Decawave的工程师使用了另外一种方法:
Decawave测量TOF通过二次握手进行TOF时间的测量:
TOF测距方法属于双向测距技术,它主要利用信号在两个异步收发机(Transceiver)之间飞行时间来测量节点间的距
离。因为在视距视线环境下,基于TOF测距方法是随距离呈线性关系,所以结果会更加精准。我们将发送端发出的数据包和接
收回应的时间间记为TTOT,接收端收到数据包和发出回应的时间间隔记为TTAT,那么数据包在空中单向飞行的时间TTOF可
以计算为:TTOF=(TTOT-TTAT)/2。
然后根据TTOF与电磁波传播速度的成绩便可计算出两点间的距离D=CxTTOF
TOF测距方法和两个关键侧约束:
1、发送设备和接收设备必须始终同步
2、接收设备提供信号的传输时间的长短
为了实现始终同步,TOF测距方法采用了始终偏移量啦解决始终同步问题,单由于TOF测距方法的时间以来与本地的远程
几点,侧距精度容易受两端节点中的始终偏移量的影响。为了减少此类错误的影响,这里采用反向测量方法,即远程节点发送
数据包,本地节点接收数据包,并自动响应。通过平均正向和反向多次测量的平均值,减少对任何始终偏移量的影响,从而减
少测距误差。
下载后可阅读完整内容,剩余1页未读,立即下载
985 浏览量
430 浏览量
点击了解资源详情
567 浏览量
469 浏览量
985 浏览量
1094 浏览量
108 浏览量
221 浏览量

weixin_38565221
- 粉丝: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- 网页自动刷新工具 v1.1 - 自定义时间间隔与关机
- pt-1.4协程源码深度解析
- EP4CE6E22C8芯片三相正弦波发生器设计与实现
- 高效处理超大XML文件的查看工具介绍
- 64K极限挑战:国际程序设计大赛优秀3D作品展
- ENVI软件全面应用教程指南
- 学生档案管理系统设计与开发
- 网络伪书:社区驱动的在线音乐制图平台
- Lettuce 5.0.3中文API文档完整包下载指南
- 雅虎通Yahoo! Messenger v0.8.115即时聊天功能详解
- 将Android手机转变为IP监控摄像机
- PLSQL入门教程:变量声明与程序交互
- 掌握.NET三层架构:实例学习与源码解析
- WPF中Devexpress GridControl分组功能实例分析
- H3Viewer: VS2010专用高效帮助文档查看工具
- STM32CubeMX LED与按键初始化及外部中断处理教程
