本篇文档是关于ABB工业机器人的串口通信教程,适用于RobotWare 6.0及以上版本的IRC5系列机器人。教程详细讲解了以下几个关键知识点:
1. 串口功能概述:
ABB机器人提供了串口功能,用于与外部设备进行数据交换,这项功能是免费的,但需配合特定的硬件如主计算机单元(DSQC1000或DSQC1018)和扩展板卡DSQC1003。串口通信可用于与生产设备进行通信,CONSOLE接口主要用于调试。
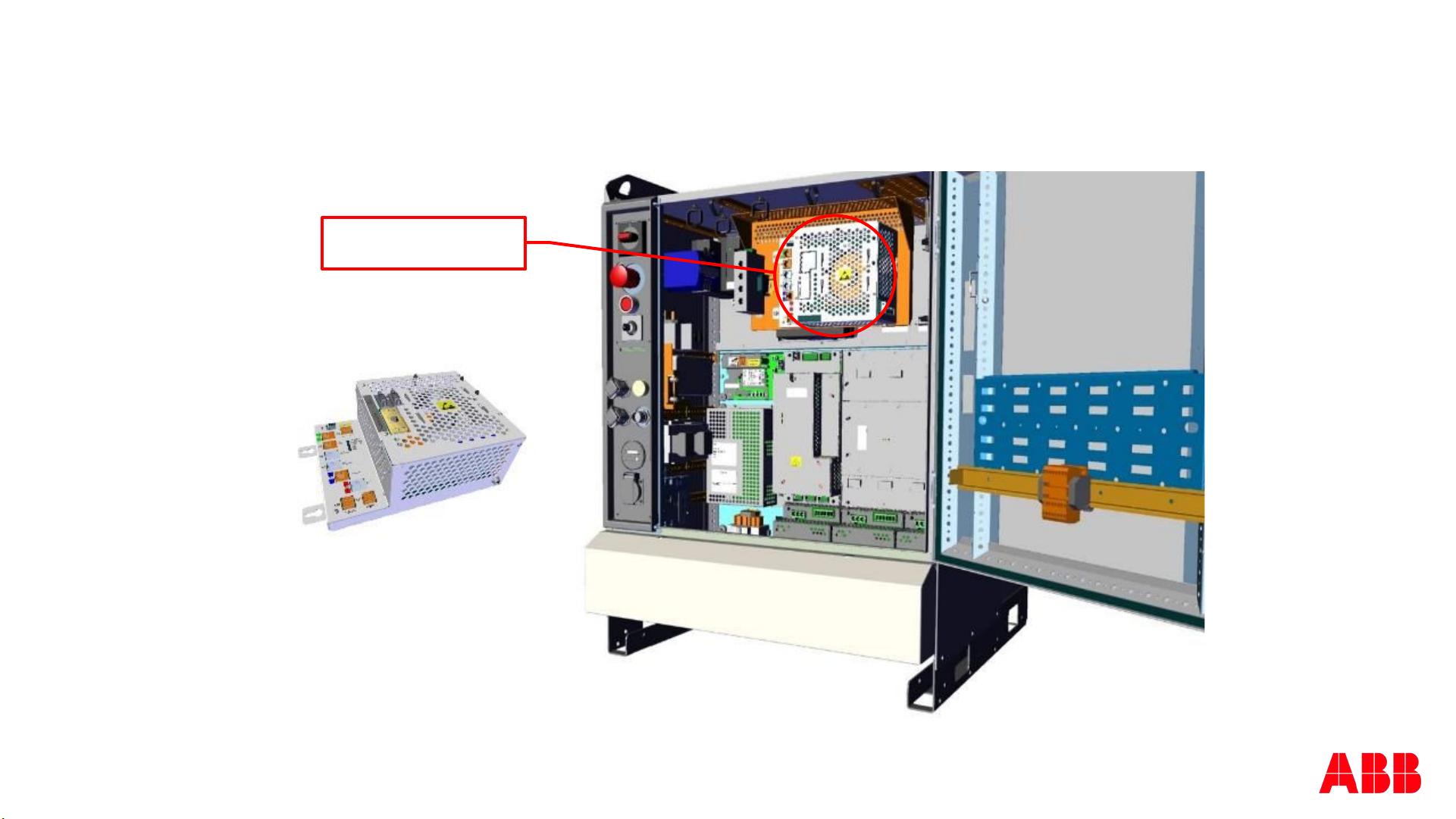
2. 串口位置与配置:
- 在标准型和紧凑型控制柜中,主计算机单元中包含串口。例如,IRC5标准型控制柜的主计算机单元有串口,而紧凑型可能还需通过现场总线适配器来实现串口连接。
- 扩展板如CONSOLE、DeviceNet、PROFIBUS、Ethernet/IP和PROFINET slave适配器都可能提供串口COM1,这些适配器允许机器人控制器支持不同的通信协议。
- IRC5的串口COM1采用EIA-RS-232C标准,连接线需要正确匹配,如与PC通信用交叉线,与设备通信用直通线。
3. 串口参数设置:
- 配置串口时,波特率、奇偶校验位、数据位、停止位和流控制等参数需与通信伙伴设备保持一致,以确保数据传输的正确性。这些参数可在RobotStudio或示教器的SerialPort类型下的COM1配置中调整。
4. 串口操作命令:
- 提供了打开和关闭串行通道的命令,以及读取和写入基于字符的串行数据的功能,这对于编程时控制串口通信至关重要。
5. 注意事项:
- 在操作过程中,强调了避免在带电状态下插拔串口线,以防止损坏串口芯片。
本文档为用户提供了全面的ABB IRC5工业机器人串口通信配置指南,包括串口的物理连接、通信参数设置以及编程控制方法,有助于用户理解和操作机器人与外部设备之间的数据交换。