
2018-2020 Microchip Technology Inc. DS20005790C_CN 第 1页
ATA6562/3
特性
• 完全符合 ISO 11898-2、ISO 11898-2: 2016 和
SAE J2962-2标准
• 符合CAN FD标准
• 最高5Mbps的通信速度
• 低电磁辐射(Electromagnetic Emission,EME)
和高电磁抗扰度(Electromagnetic Immunity,
EMI)
• 具有宽共模范围的差分接收器
• ATA6562:静默模式
• 通过CAN 总线实现远程唤醒功能——
ISO 11898-2: 2016 中指定的唤醒模式(Wake-Up
on Pattern,WUP),3.8 µs活动过滤时间
• 在所有电源条件下的功能行为均可预测:
• 收发器在未通电时脱离总线
•RXD隐性钳位检测
• 总线引脚具有较高的静电放电(Electrostatic
Discharge,ESD)处理能力
• 在汽车环境下对总线引脚进行瞬态保护
• 发送数据(Transmit Data,TXD)显性超时功能
•VCC和VIO引脚欠压检测
• CANH/CANL具有短路和过热保护
• 符合OEM“Hardware Requirements for LIN, CAN
and FlexRay Interfaces in Automotive Applications,
Rev. 1.3”
• 符合AEC-Q100 要求
• 可选择两种环境温度等级:
- ATA6562-GAQW1、ATA6563-GAQW1、
ATA6562-GBQW1和ATA6563-GBQW1,最高
T
amb
= +125°C
- ATA6562-GAQW0、ATA6563-GAQW0、
ATA6562-GBQW0和ATA6563-GBQW0,最高
T
amb
= +150°C
• 封装:具有可润湿侧翼的 SOIC8 和 VDFN8(潮湿
敏感度1 级)
应用
汽车、工业、航天、医疗和消费类应用中的经典CAN
和CAN FD 网络。
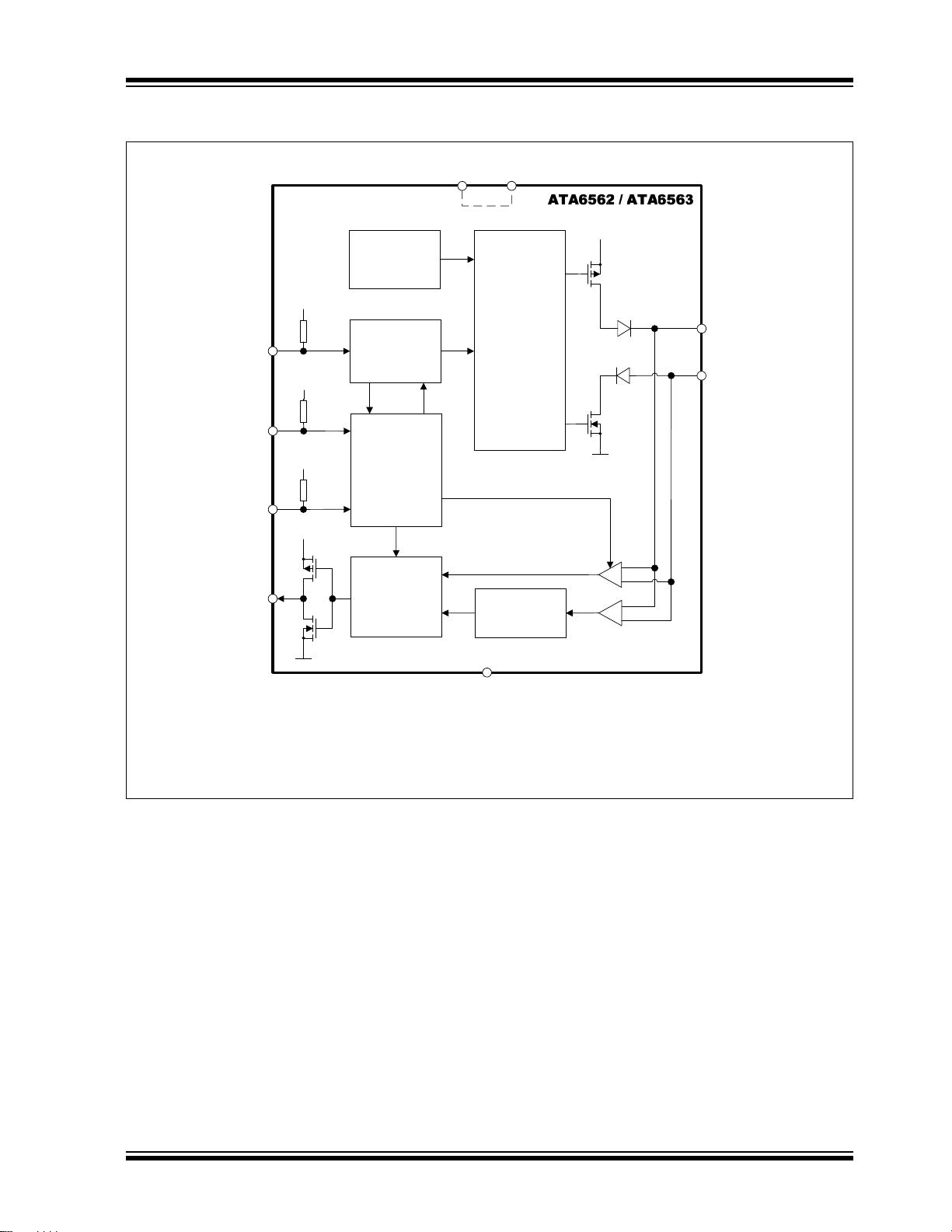
概述
ATA6562/ATA6563 是一款高速CAN 收发器,可在控制
器局域网(Controller Area Network,CAN)协议控制
器和物理双线CAN 总线之间提供接口。
该收发器专为汽车行业的高速(最高5 Mbps)CAN
应用而设计,为具有CAN 协议控制器的单片机提
供差分发送和接收功能。它能够改进电磁兼容性
(ElectroMagnetic Compatibility,EMC)和静电放电
(ESD)性能,并且具有以下特性:
• 当电源电压关闭时,CAN总线表现出理想的无源
行为
• 直接连接到电源电压为3V 至 5V 的单片机
(ATA6563)
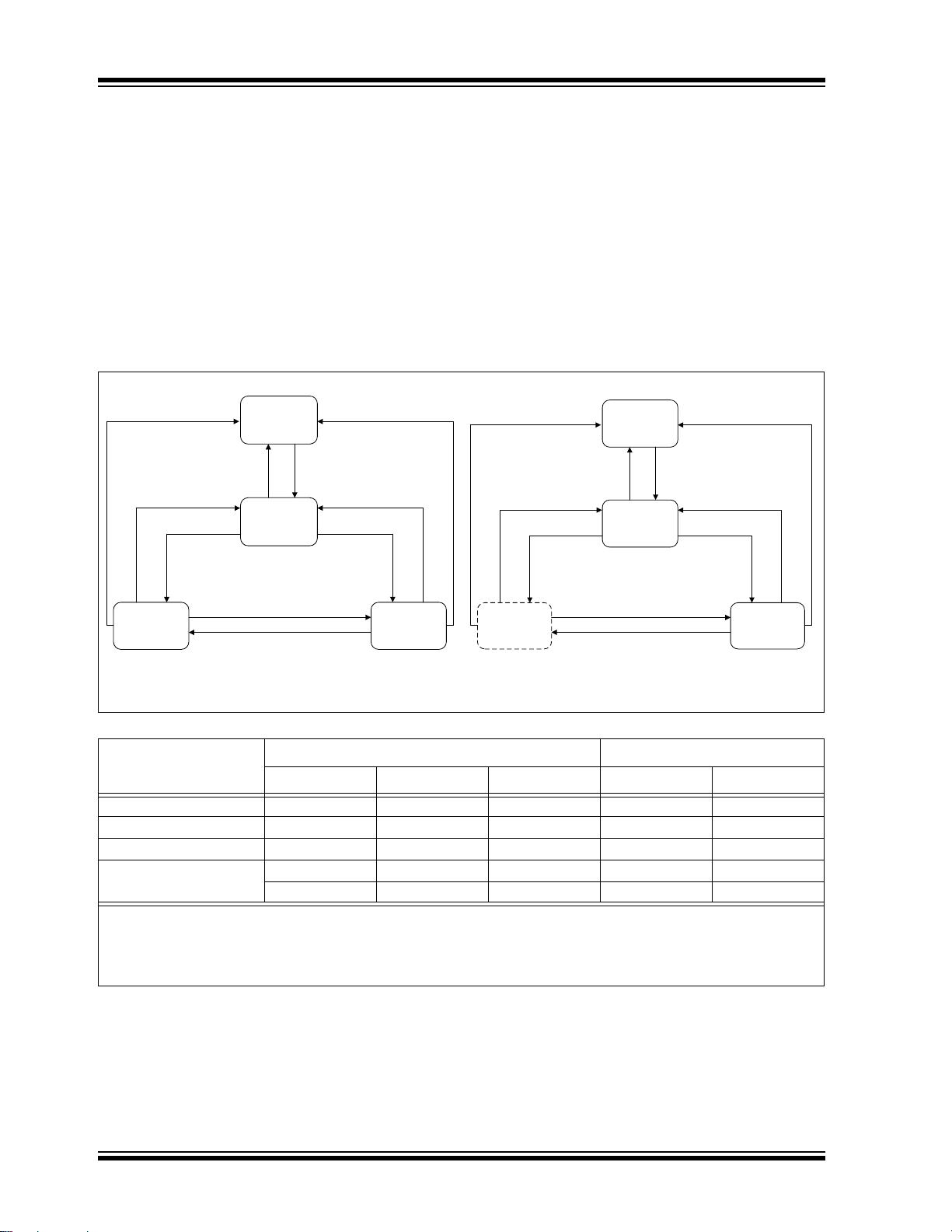
ATA6562/ATA6563 具有三种工作模式以及专用故障保
护功能,是所有类型的高速CAN 网络的理想选择,对
于需要低功耗模式(通过CAN 总线唤醒)的节点更是
如此。
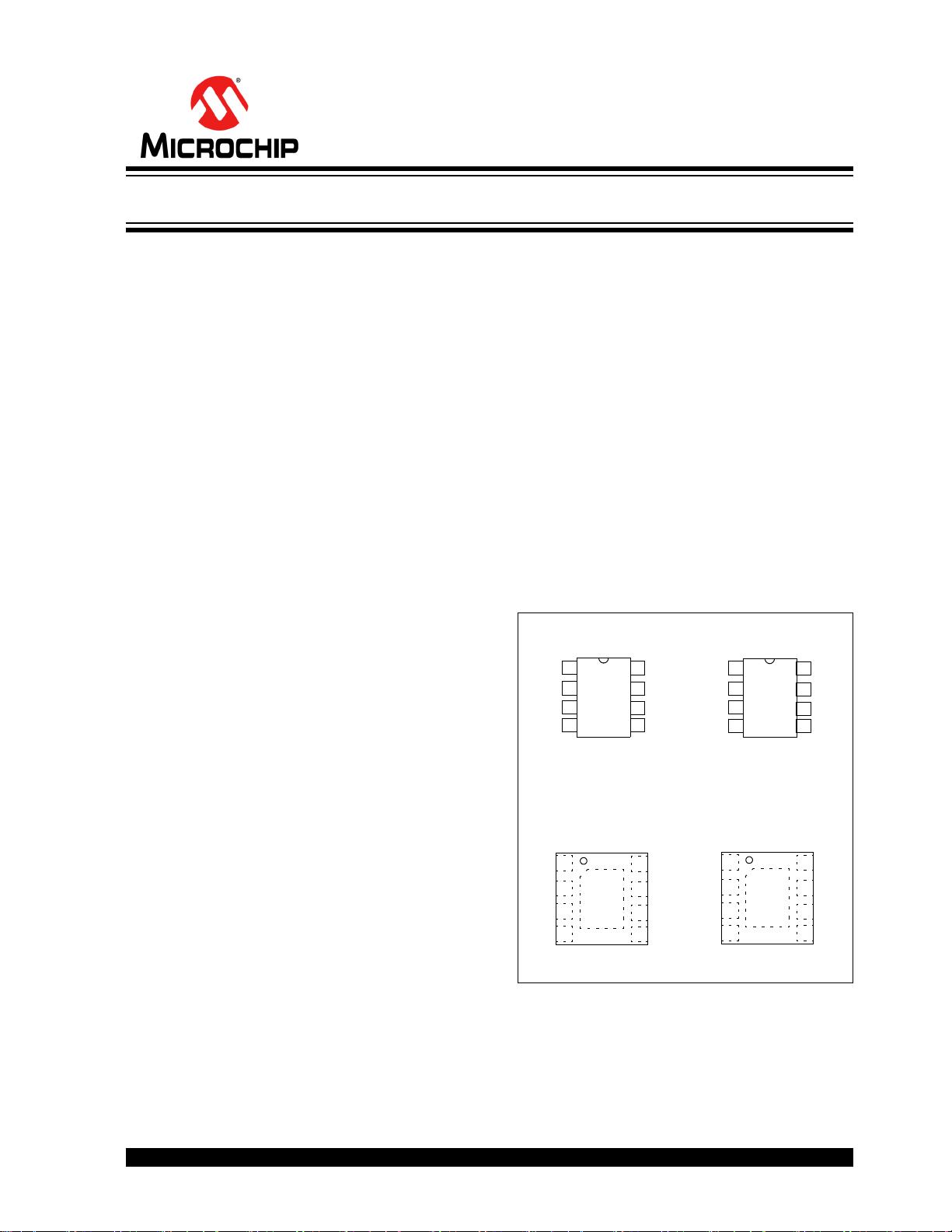
封装类型
ATA6563
具有可润湿侧翼的
3x3 VDFN*
ATA6562
SOIC
VCC
GND
RXD
CANH
CANL
1
2
3
4
8
7
6
5
NSIL
STBYTXD
ATA6563
SOIC
VCC
GND
RXD
CANH
CANL
1
2
3
4
8
7
6
5
VIO
STBYTXD
ATA6562
具有可润湿侧翼的
3x3 VDFN*
VCC
GND
RXD
CANH
CANL
NSIL
STBY
TXD
1
2
3
4
8
7
6
5
*包含外露的散热焊盘(EP),请参见表1-2。
VCC
GND
RXD
CANH
CANL
VIO
STBY
TXD
1
2
3
4
8
7
6
5
具有待机模式的高速CAN 收发器

剩余29页未读,继续阅读

简途
- 粉丝: 3
- 资源: 71
 我的内容管理
收起
我的内容管理
收起
- 我的资源
快来上传第一个资源
 我的收益 登录查看自己的收益
我的收益 登录查看自己的收益 我的积分
登录查看自己的积分
我的积分
登录查看自己的积分
 我的C币
登录后查看C币余额
我的C币
登录后查看C币余额
 我的收藏
我的收藏  我的下载
我的下载  下载帮助
下载帮助

会员权益专享




最新资源
- 基于嵌入式ARMLinux的播放器的设计与实现 word格式.doc
- 经典:大学答辩通过_基于ARM微处理器的嵌入式指纹识别系统设计.pdf
- 嵌入式系统课程设计.doc
- 基于飞思卡尔控制器的智能寻迹车设计ARM基础课程课程设计.doc
- 下载基于ARM7的压电陶瓷换能器导纳圆测量仪的研制PDF格式可编辑.pdf
- 课程设计基于ARM的嵌入式家居监控系统的研究与设计.doc
- 论文基于嵌入式ARM的图像采集处理系统设计.doc
- 嵌入式基于ARM9的中断驱动程序设计—课程设计.doc
- 在Linux系统下基于ARM嵌入式的俄罗斯方块.doc
- STK-MirrorStore Product Release Notes(96130)-44
- STK-MirrorStore Storage Connectivity Guide for StorageTek Disk A
- 龙虾养殖远程监控系统的设计与实现数据采集上位-机软件模块-本科毕业设计.doc
- 龙虾养殖远程监控系统的设计与实现数据采集上位-机软件模块-.doc
- 龙虾养殖远程监控系统的设计与实现数据采集上位-机软件模块-本科生毕业论文.doc
- 麻阳风貌展示网站的设计与实现毕业论文.pdf
- 高速走丝气中电火花线切割精加工编程设计.doc
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


