
基于基于STM32的机械臂反馈控制系统的机械臂反馈控制系统
为了解决机械臂开环控制精度低的问题,设计了一套基于STM32微控制器的机械臂反馈控制系统。通过QT图形
界面将控制数据输入上位机,控制数据经串口传输到微控制器后驱动机械臂运动;由加速度传感器和磁通传感
器组成的惯性传感器节点采集机械臂运动数据传回微控制器,采用由多个相关的参数可变PID控制器构成的控制
器组对机械臂各个部位进行反馈控制。测试结果表明,利用惯性传感器实现的改进型PID的反馈控制系统比无反
馈控制系统精度有较大提高,可用于实现更高精度的机械臂控制。
摘摘 要要: 为了解决
关键词关键词: 机械臂;
0 引言引言
机械臂作为一种实用的机器人设备,被广泛地应用在工业生产和日常生活中。周舟等人[1]控制机械臂进行番茄采摘,根
据仿真结果调节控制参数。李鲤[2]以钻孔机械臂为研究对象,着重对交流伺服电机的驱动进行了研究。刘洋等人[3]在
LabVIEW环境下开发了视觉伺服机械臂控制系统的实验平台。以上这些系统采用的均是开环控制,虽也能满足特定的应用场
合,但无法满足高精度机械臂控制的需求。
赵杰等人[4]设计了双关节机械臂控制系统,利用光电编码器实现了机械臂的闭环控制,但光电编码器精度仍然较低。因
此,本文设计了针对机械臂的改进型PID闭环控制系统,该系统利用惯性传感器采集机械臂运动数据,在STM32平台上实现机
械臂的反馈控制,旨在提高机械臂的控制精度以满足精细化动作控制的需求。
1 系统概述系统概述
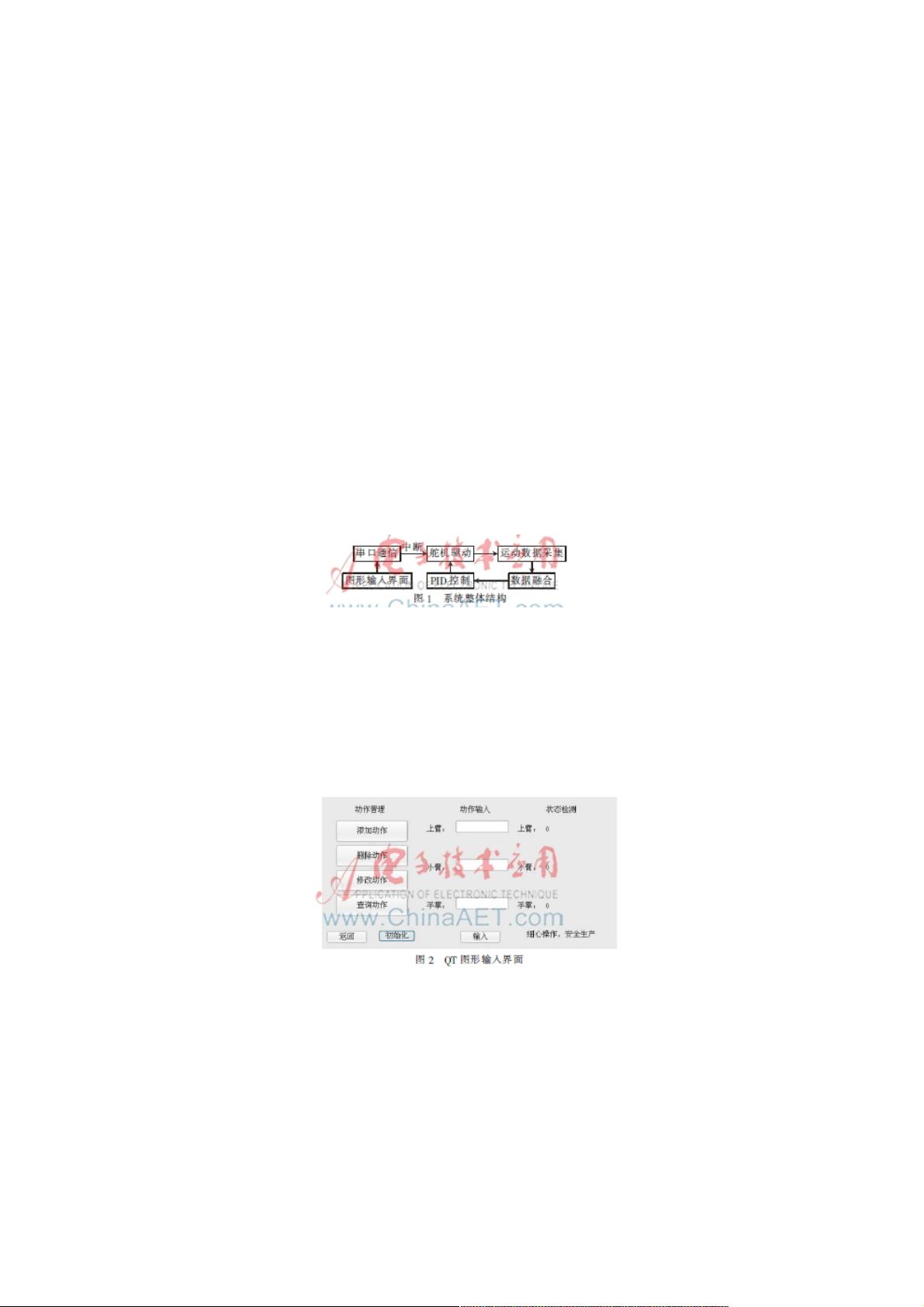
系统硬件部分由STM32微控制器、三关节三自由度机械臂和惯性传感器节点组成。软件部分包含QT图形输入界面、舵机
驱动、控制数据生成和反馈控制。系统整体结构如图1所示,上位机通过QT图形界面采集用户输入的机械臂控制数据后通过串
口传输到STM32微控制器,微控制器根据控制数据驱动机械臂运动并读取惯性传感器节点采集的数据进行反馈控制。
2 QT图形输入界面图形输入界面
为了实现良好的用户体验和方便远程控制,本文设计了相应的QT图形界面。用户通过上位机可以远程控制机械臂并监测
其运行状态,STM32微控制器和上位机之间通过RS232串口通信。图形界面由输入区和状态监控区两部分组成,如图2所示,
用户可以通过监控区观察本次动作的完成度以决定是否进行下一个动作。
3 反馈数据生成
惯性传感器模块由加速度传感器ADXL345和磁通传感器HMC5883组成,将惯性传感器模块绑定在机械臂各个部位,经过
数据预处理[5]可分别采集传感器坐标系下的重力加速度Gs和地磁通量?椎s。记地理坐标系下的重力加速度和地磁通量分别为
Ge和e,从传感器坐标系变换到地理坐标系对应的旋转矩阵为R,其对应的四元数表示为Q=w+xi+yi+zk。

weixin_38504089
- 粉丝: 6
- 资源: 948
 我的内容管理
收起
我的内容管理
收起
- 我的资源
快来上传第一个资源
 我的收益 登录查看自己的收益
我的收益 登录查看自己的收益 我的积分
登录查看自己的积分
我的积分
登录查看自己的积分
 我的C币
登录后查看C币余额
我的C币
登录后查看C币余额
 我的收藏
我的收藏  我的下载
我的下载  下载帮助
下载帮助

会员权益专享




最新资源
- VMP技术解析:Handle块优化与壳模板初始化
- C++ Primer 第四版更新:现代编程风格与标准库
- 计算机系统基础实验:缓冲区溢出攻击(Lab3)
- 中国结算网上业务平台:证券登记操作详解与常见问题
- FPGA驱动的五子棋博弈系统:加速与创新娱乐体验
- 多旋翼飞行器定点位置控制器设计实验
- 基于流量预测与潮汐效应的动态载频优化策略
- SQL练习:查询分析与高级操作
- 海底数据中心散热优化:从MATLAB到动态模拟
- 移动应用作业:MyDiaryBook - Google Material Design 日记APP
- Linux提权技术详解:从内核漏洞到Sudo配置错误
- 93分钟快速入门 LaTeX:从入门到实践
- 5G测试新挑战与罗德与施瓦茨解决方案
- EAS系统性能优化与故障诊断指南
- Java并发编程:JUC核心概念解析与应用
- 数据结构实验报告:基于不同存储结构的线性表和树实现
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


