
北斗格网电离层模型格网点计算方法研究北斗格网电离层模型格网点计算方法研究
基于北斗导航系统星基增强系统的格网电离层模型修正算法,讨论了由穿透点处的垂直延迟计算格网点处垂直
电离层延迟的计算方案,并检验了格网电离层垂直延迟修正误差GIVE。结果表明,格网电离层修正算法是一种
精度较高的电离层延迟修正法,选取格网点附近参考站的可用数据计算出的格网点垂直延迟值更接近真实延迟
值,进而有利于获得高精度的电离层改正效果,证明了电离层格网点的延迟值是建立格网模型的关键;修正误
差在正常范围内,验证了算法在中国地区的可行性,也说明了GIVE算法能够以99.9%的置信度限定格网点电离层
延迟改正误差。
0 引言引言
卫星在导航定位过程中,信号在传播路径上会遇到诸多误差的影响,其中电离层延迟是信号传播过程中遭遇到的较大误差
源,它对卫星导航定位带来的误差影响可以达到几米甚至几十米
[1]
的误差范围。这对于卫星的精度、连续性、可用性、完好性
等性能都造成了影响,严重削弱了全球导航卫星系统(Global Navigation Satellite System,GNSS)导航定位的准确度,是北斗
星基导航系统实现过程中的一项非常重要的误差来源。目前对电离层延迟误差最有效的校正方法是双频校正法,但是用户端只
能通过单频设备进行定位解算,所以对于大多数的单频用户来讲,只能接受模型法对误差的校正,这使诸如格网模型、
Klobuchar模型等的模型法研究有着非常重要的意义。所以,有学者对上述电离层误差改正模型在中国地区的性能进行过研
究。崔莹莹等对北斗广域差分格网电离层模型修正电离层延迟算法进行了阐述与试验验证
[2]
;詹先龙、刘瑞华等基于格网电离
层延迟算法并利用25个参考站的模拟数据对在我国建立格网电离层延迟模型的可行性进行了分析
[3]
。
本文以我国自主发展的北斗卫星导航系统
[4-5]
为基础,验证了基于北斗导航系统的星基增强系统格网电离层修正算法在中国
地区部分站点的修正精度,重点研究了计算格网点垂直延迟的两种穿透点垂直延迟值的选择方案,并分析了两种计算方案对电
离层误差的改正效果。利用中国大陆构造环境监测网络的10个GNSS参考站的观测数据,仿真分析了电离层延迟值以及格网电
离层垂直延迟修正误差GIVE。
1 电离层模型校正算法原理电离层模型校正算法原理
1.1 格网电离层模型概述格网电离层模型概述
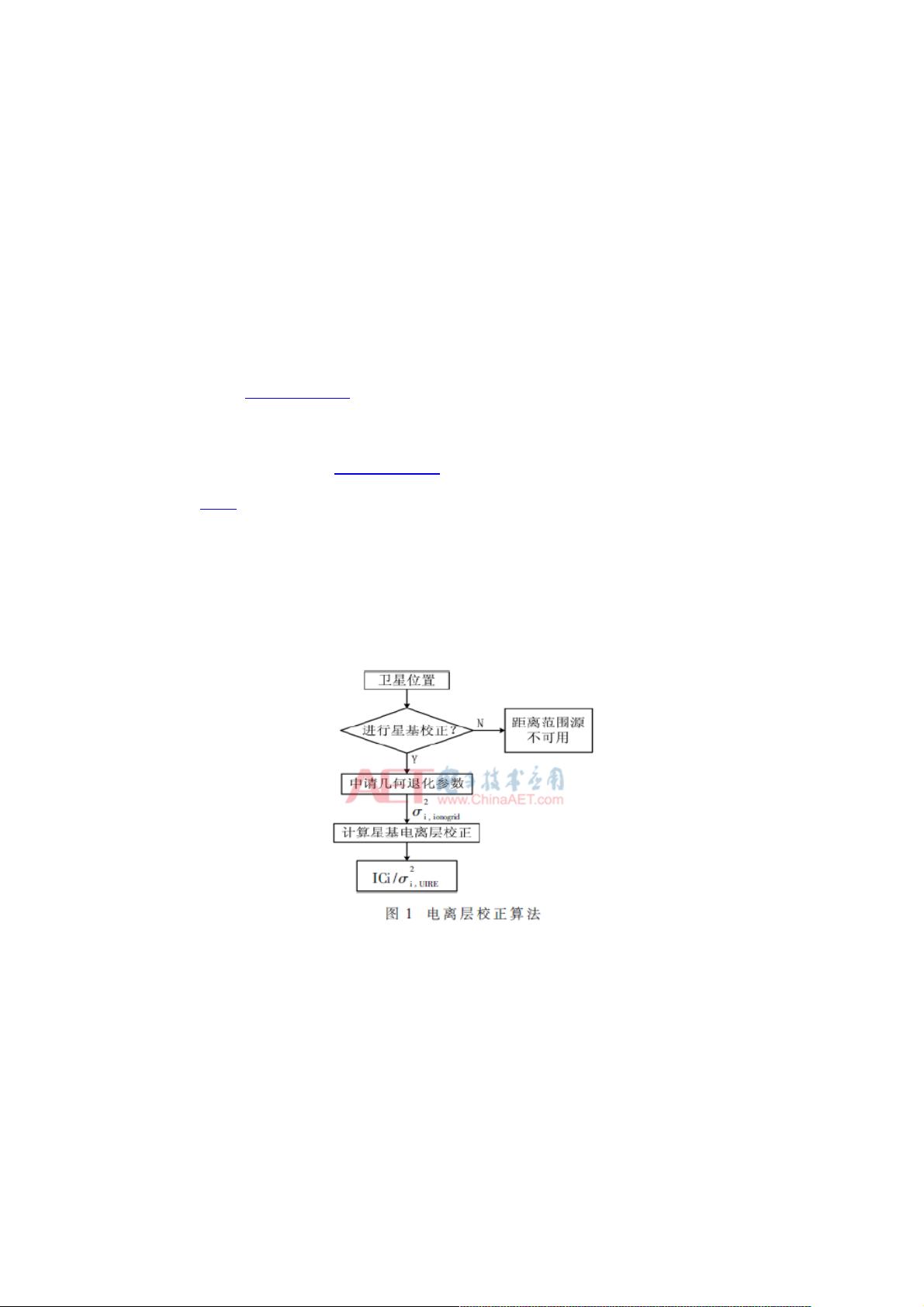
电离层延迟校正算法的逻辑流程如图1所示。根据卫星位置信息结合卫星报文类型18确定电离层穿透点的位置以及获取用于
计算卫星修正位置的卫星倾角信息。下一步根据卫星报文26的内容计算电离层倾斜范围的延迟和误差模型方差,判断校正参
数是否可用于修正卫星位置从而获得更精准的位置信息。
格网电离层模型是将整个电离层中的自由电子沿垂直方向压缩至距离地面高度一定(375 km)的单层球面上,近似看成大
气层上空的一个单层壳层,根据此理想化的单层电离层模型替代整个电离层作为共同的电离层参考面。本文将电离层以经度
5°、纬度2.5°的形式划分成诸多网格,计算电离层延迟值。
具体的实现过程为:配备有双频接收机的监测站利用双频信号频量与电离层延迟的函数关系直接计算出其监测下可视卫星
的实时电离层延迟值,同时给出在电离层参考面上该颗卫星的穿透点坐标信息,通过地面通信链路网实时传送给主控站;主控
站处理获得的基本数据信息,计算得到电离层参考面上每个网格结点的垂直入射方向的电离层延迟值,作为修正参数由GEO
卫星以导航电文的信息格式进行广播;用户则通过接收相关修正参数及卫星观测信息计算其在电离层参考面上的可视卫星的经
纬度并对照接收获取的网格结点的电离层延迟数据,依算法获得电离层延迟值
[6]
。
1.2 格网点垂直延迟值的计算格网点垂直延迟值的计算
计算格网点的垂直延迟值,首先需要获取穿透点的垂直电离层延迟值数据,选用双频校正法计算。















