
CAN总线驱动的步进电机多机精密控制设计
322KB |
更新于2023-05-11
| 166 浏览量 | 举报
6
收藏
 立即下载
立即下载 本文主要探讨了基于CAN总线的步进电机多机控制系统的详细设计。CAN(Controller Area Network)总线作为一种工业现场总线,因其通信距离远、传输速度快的优势,在汽车和非汽车领域得到了广泛应用,尤其在机械工业、家用电器以及传感器等测控领域。步进电机作为精密的位置控制执行器,因其结构简单、成本低、定位精度高且无误差累积的特性,被广泛应用于自动化控制系统。
系统设计的核心目标是实现对多个步进电机的全集成数字控制。设计中,采用一台PC机作为主控制器,通过USB接口与USB-CAN接口转换模块相连,这个模块内部含有单片机CH372,负责数据的接收和转发。单片机进一步通过SJA1000将数据发送至CAN总线,形成一个高效的通信网络。各节点则配备单片机控制的CAN模块,它们接收指令后控制步进电机驱动器和电机终端,实现对步进电机速度、方向和行程的精确控制。
硬件设计部分着重于USB-CAN接口模块和CAN节点接收模块电路。USB-CAN接口模块由51单片机、CH372、SJA1000和82C250组成,这些组件协同工作,确保数据的稳定传输。其中,CH372既能从USB口获取+5V电源,简化了电源管理。单片机和接口芯片通过片选信号实现了互不影响的独立读写操作,确保了通信效率。
CAN控制系统的外围接口是实现其功能的关键,这包括CAN收发器、错误检测单元和仲裁机制,它们共同构建了一个可靠的数据交换环境。通过这些设计,系统能够有效地协调多个步进电机的运动,从而在工业自动化或机器人等领域中实现精确的多电机控制。
本文的研究不仅展示了CAN总线在步进电机控制中的实际应用,还提供了具体的设计方法和实现步骤,为读者提供了宝贵的技术参考和实践经验。对于从事电机控制、嵌入式系统设计以及工业自动化的人来说,理解并掌握这种基于CAN总线的多机控制系统具有很高的实用价值。
基于基于CAN总线的步进电机多机控制系统的设计总线的步进电机多机控制系统的设计
can现场总线具有通信距离远、传输速度快的特点,该系统可实现对电机的全集成数字控制。基于步进电机行程
的可控性,本系统可实现对运动对象的精确位置控制。
1 引言
由于can总线的系统集成特点,基于汽车车身控制系统的can总线技术应用范围已经远远超越汽车控制领域,扩展到了机械工
业、家用电器及传感器等各种其它测控领域,被国际公认为是重要的的工业现场总线。作为运动控制对象,步进电动机作为一
种将离散的电脉冲信号转化成角位移的机械执行装置,具有结构简单、成本低、定位精度高和无误差累积等优点,已被广泛应
用于各种自动控制系统中。随着微型计算机和微电子技术的发展,步进电机的这一性能必将得到更为广泛的应用。因此对于
can总线的步进电动机控制研究具有十分明显的现实意义。
2 系统总体设计方案
该系统可由一台pc机作为命令发送主机,通过bus-can接口转换模块接入can总线,各节点是有单片机控制的具有can总线数据
收发功能的模块,来控制步进电机驱动器及电机终端。在pc机的应用层根据事先规定的格式把数据由usb接口发送给基于usb
总线的通用设备接口芯片ch372的usb-can接口转换模块上的单片机,单片机处理之后,再把数据传送到连接着各个步进电机
驱动器的节点的can总线上,各个节点的控制模块根据接收到的数据信息进行处理,实现对步进电机的速度、正反转及行程控
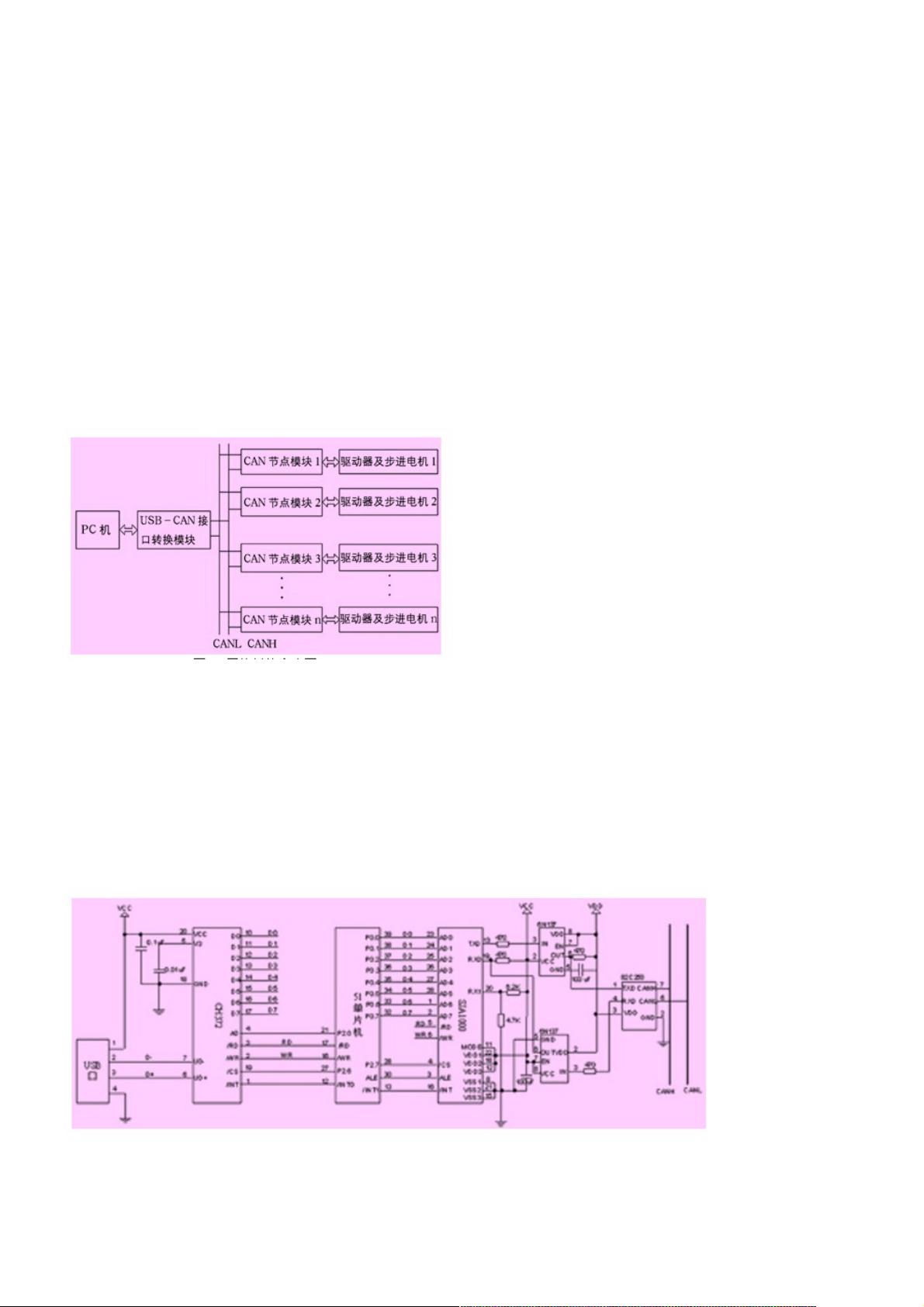
制。图1为本设计的系统方案图。
图1 系统总体方案图
3 硬件设计方案
系统的硬件包括usb-can接口模块和can节点接收模块电路的设计。
3.1 usb-can接口模块电路的设计
bus-can接口模块主要是由51单片机、ch372、sja1000及82c250组成,主机通过ch372把数据发送到单片机,单片机再把数据
通过sja1000发送到can总线上。图2中给出了从pc机的usb口到can总线的主要元件及其连接。图2及图3中的vdd、vcc均为+5v
直流电源,ch372有支持两种电源,+5v和+3.3v,本设计中使用的是+5v,可以直接从usb口获得,简化了电路设计。与单片
机连接的ch372和sja1000通过片选信号实现互不干涉的读写过程,完成各自的任务。
图2 usb-can接口转换模块原理图
can控制要实现其功能,必须具有外围扩展接口,构成完整的can通信系统,本设计选用pca82c250器件作为can控制器的
sja1000和物理总线间的接口,提供总线的差动发送和接收能力,处理来自canh和canh线的信号,并将处理后的信号传至控制
单元的can接收区。为了保护芯片并提高抗干扰能力,在控制器sja1000和82c250之间加入高速光电隔离器6n137。can总线网
络两端要接120欧姆的匹配电阻,可大大的提高通信的抗干扰性和可靠性。
下载后可阅读完整内容,剩余3页未读,继续阅读
开通会员,免费下载(低至0.43元/天)

成为会员后, 你将解锁

相关推荐





weixin_38685832
- 粉丝: 4
 我的内容管理
展开
我的内容管理
展开







最新资源
- Weblogic功能详解及使用手册
- 软件自动化测试资料分析与应用
- C++实现Joseph问题:nlgn时间算法与平衡二叉树
- VB字符判断程序:菜鸟的实践与交流
- 掌握Lucene全文索引:搜索实例演示
- Helloer_v1.8版发布:全面的技术文档与安装资源
- 掌握NS2网络仿真工具:步骤与分析
- Proteus仿真Max7221动态显示实用教程
- C#纸业销售管理系统开发与下载指南
- LWUIT J2ME界面设计实例与Eclipse项目转换
- MP3剪切软件工具:轻松编辑你的音乐文件
- JSP与SQL结合的人事管理系统开发教程
- 梁昆淼数学物理方法习题解答精编
- 批量将Word文档转换为Flash文档工具
- Pbkiller 2.5.8:Powerbuilder文件反编译神器
- USB开发基础教程与驱动结构分析
- 掌握CVS使用与安装:完整基础教程与软件下载
- 网页制作遇到的问题与解决方案集锦
- L7手机连接必备:高效USB驱动安装指南
- C#实现的人力资源管理系统代码分析
- MFC实现ODBC数据库闹钟功能
- Win32系统服务开发深度解析与实战案例
- Java+Swing开发的企业人事管理系统研究
- 计算机行业翻译利器:专业英语翻译软件
