
一、 摄像机成像(小孔成像)与齐次坐标
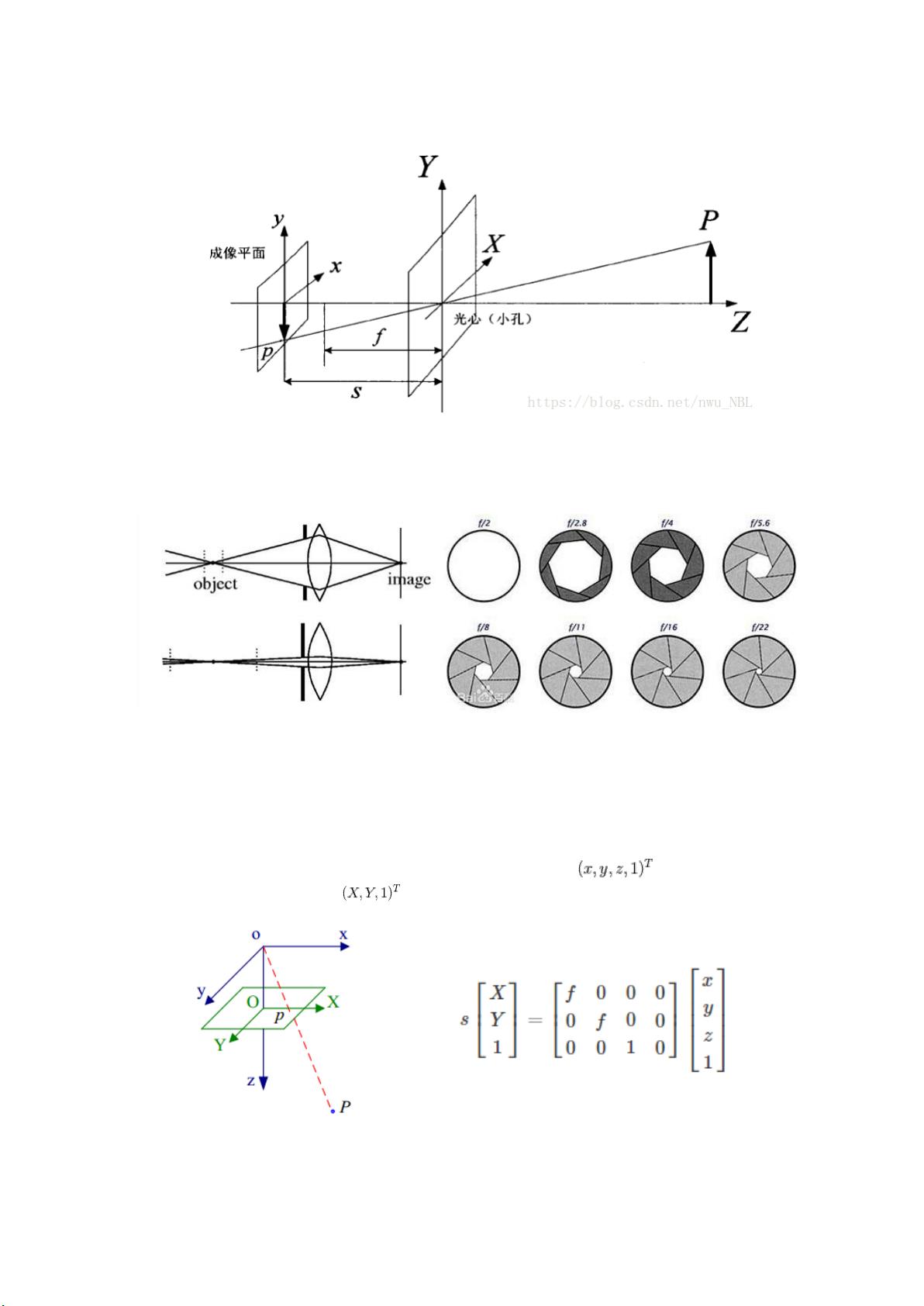
小孔成像模型主要由光心,光轴,成像平面三个部分组成。在实际的环境中,由于小孔
的透光量非常小,在成像平面形成清晰地像需要较长的时间曝光,所以实际的摄像机光学系
统大多是由透镜组成,原理与小孔成像相似。
景深、光圈、进光量。光圈越大,景深越小,适合做背景虚化;反之光圈越小景深越大。
光圈从空间上限制进光面积来控制进光量,而快门则是从曝光时间上来控制。快门时间,
通常以 1/N 秒为单位。快门除了可以控制进光量从而影响照片曝光,还可以制造一些特别的
拍照效果。当快门时间较长时,相机的抖动可能会造成成像模糊,可以使用三脚架解决。
焦距影响成像大小和视场角(FOV)。长焦镜头可以拍摄远处物体,广角镜头,焦距小,
能拍摄较大的场景;通常焦距越大,景深越小。感光度、色差、畸变。
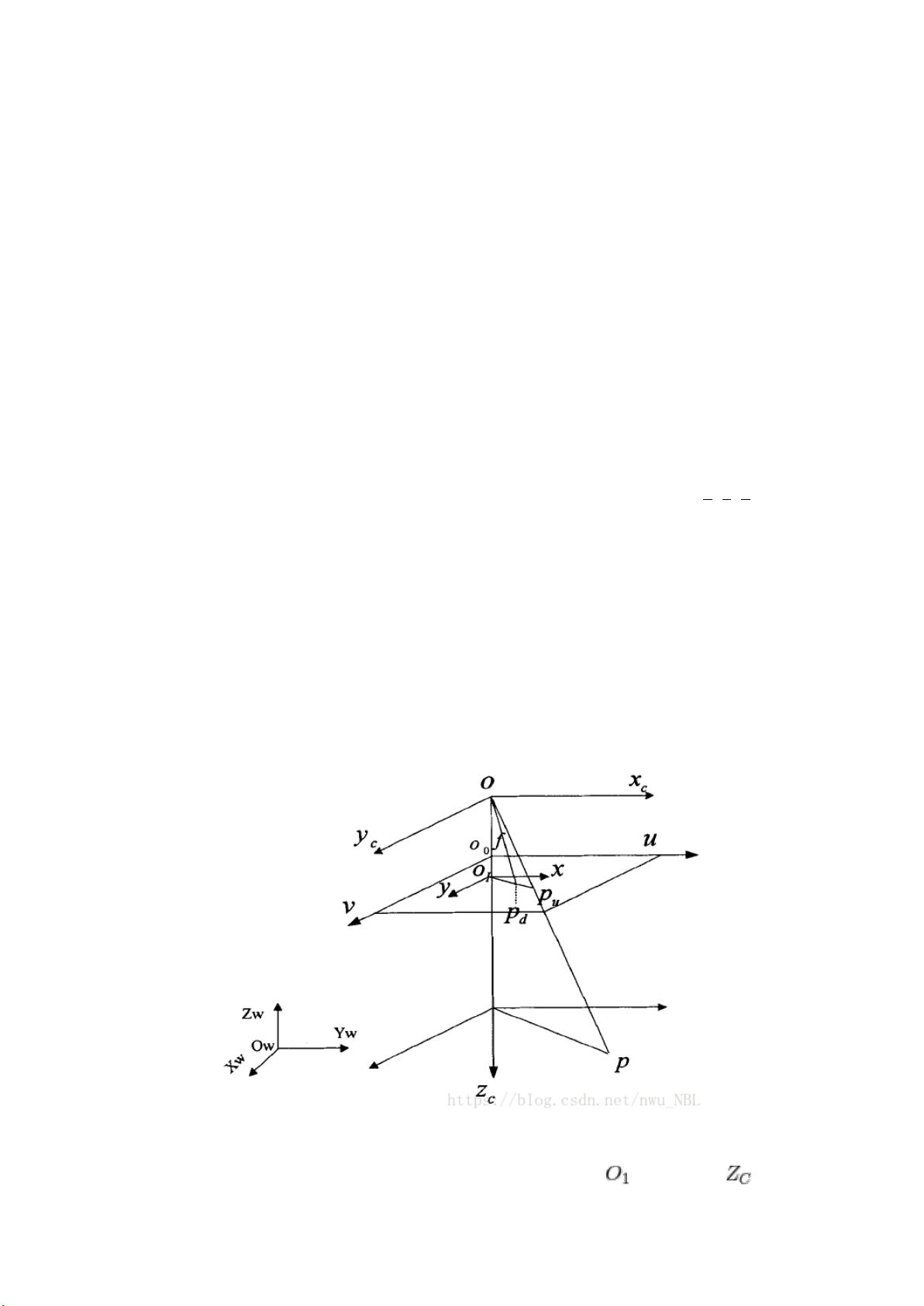
光屏移到光心和物体之间,有利于简化运算。透视投影的矩阵表示如下,其中,s 为比
例因子(s 不为 0), f 为有效焦距(光心到图像平面的距离), 是空间点 P 在相机
坐标系 oxyz 中的齐次坐标, 是像点 p 在图像坐标系 OXY 中的齐次坐标。
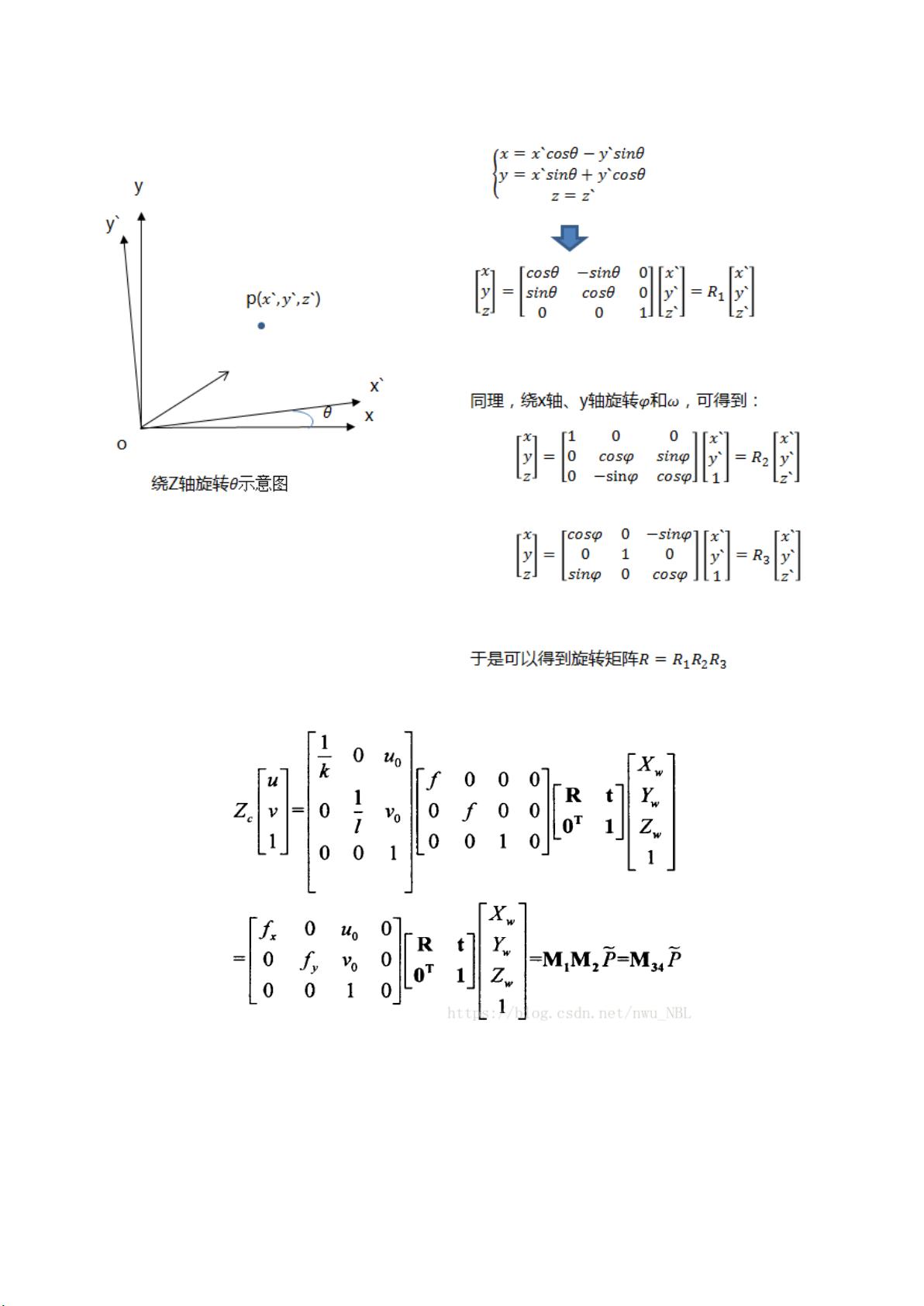
齐次坐标就是将一个原本是 n 维的向量用一个 n+1 维向量来表示,齐次坐标的使用能
够大大简化在三维空间中的点线面表达方式和旋转平移等操作。

剩余18页未读,继续阅读

隔壁的戏子
- 粉丝: 4
- 资源: 1
 我的内容管理
收起
我的内容管理
收起
- 我的资源
快来上传第一个资源
 我的收益 登录查看自己的收益
我的收益 登录查看自己的收益 我的积分
登录查看自己的积分
我的积分
登录查看自己的积分
 我的C币
登录后查看C币余额
我的C币
登录后查看C币余额
 我的收藏
我的收藏  我的下载
我的下载  下载帮助
下载帮助

会员权益专享




最新资源
- zigbee-cluster-library-specification
- JSBSim Reference Manual
- c++校园超市商品信息管理系统课程设计说明书(含源代码) (2).pdf
- 建筑供配电系统相关课件.pptx
- 企业管理规章制度及管理模式.doc
- vb打开摄像头.doc
- 云计算-可信计算中认证协议改进方案.pdf
- [详细完整版]单片机编程4.ppt
- c语言常用算法.pdf
- c++经典程序代码大全.pdf
- 单片机数字时钟资料.doc
- 11项目管理前沿1.0.pptx
- 基于ssm的“魅力”繁峙宣传网站的设计与实现论文.doc
- 智慧交通综合解决方案.pptx
- 建筑防潮设计-PowerPointPresentati.pptx
- SPC统计过程控制程序.pptx
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈



评论0