美国机器人技术路线图:制造业与医疗的未来
需积分: 44 148 浏览量
更新于2023-05-16
收藏 1.32MB PDF 举报
《美国机器人技术路线图:从互联网到机器人》是一份由美国多个知名学府和机构合作编撰的重要报告,它于2009年5月发布,旨在探讨机器人技术在美国经济中的关键作用以及对未来制造业和卫生保健领域的影响。该路线图由Georgia Institute of Technology、University of Southern California、Johns Hopkins University等顶尖学府联合组织,得到了Tech Collaborative的支持。
报告首先概述了机器人作为经济发展的关键推动因素,强调了其在制造业和卫生保健领域的显著潜力。制造业方面,报告指出机器人技术对经济的推动力源自其能够提升生产效率、降低人力成本并创造新的市场机会。随着技术的发展,特别是学习和适应能力的增强,机器人在自动化生产线上的角色将更加重要,如模型构建、分析、模拟与控制技术的进步将使制造业实现更高效的生产流程。
在战略层面上,报告提出了一种愿景,即通过机器人技术重塑制造业,使之更加智能化和灵活,以应对全球竞争。路线图着重于确定针对制造业的研究和开发方向,包括但不限于:
1. **学习和适应**:关注机器人的自主学习能力,使其能根据环境变化和任务需求自我调整,提高灵活性和任务执行的准确性。
2. **模型化、分析、模拟与控制**:强调利用先进的数学模型和计算技术,优化机器人系统的设计和操作,以便进行精确的预测和控制,减少误差和故障。
3. **关键能力**:定义了对制造业至关重要的机器人技术能力,如感知环境、精准定位、人机协作、以及高级决策制定能力。
此外,报告还针对特定市场进行了深入分析,提供了关于新市场机遇和就业前景的观点。这些市场可能涉及自动化升级、新兴服务行业(如老年护理)、以及对创新应用的需求增长,如无人机、自动驾驶等领域。
最后,路线图鼓励进一步的信息共享和合作,以加速美国机器人技术的发展和应用。这份路线图不仅代表了当时的技术现状,也预示了未来机器人技术在美国乃至全球范围内可能带来的深远变革。
10 A Roadmap for U.S. Robotics – From Internet to Robotics
In contrast to the U.S., China, South Korea,
Japan, and India are investing heavily in higher
education and research [NAE07]. India and
China are systematically luring back their
scientists and engineers after they are trained in
the U.S. According to [NAE07], they are “… in
essence, sending students away to gain skills and
providing jobs to draw them back.” This contrast
in investment is evident in the specific areas
related to robotics and manufacturing. Korea
is investing $100M per year for 10 years (2002-
2012) into robotics research and education as
part of their 21 century frontier program. The
European Commission is investing $600M into
robotics and cognitive systems as part of the
7th Framework Programme. While smaller
in comparison to the commitments of Korea
and the European Commission, Japan is investing $350M over the next 10 years in humanoid robotics,
service robotics, and intelligent environments. The non-defense U.S. federal investment is small by
most measures compared to these investments.
2.2. Growth Areas
The Department of Commerce and the Council on Competitiveness [CoC08, DoC04] have analyzed a
broad set of 280 companies as to their consolidated annual growth rates. The data categorized for major
industrial sectors is shown in the table below.
Sector Average Growth Growth
Robotics – manufacturing, service and medical 20% 0-120%
IP Companies 21% 15-26%
Healthcare/eldercare 62% 6-542%
Entertainment/toys 6% 4-17%
Media / Games 14% -2-36%
Home appliances 1% -4-7%
Capital equipment 8% -4-20%
Automotive 0% -11-13%
Logistics 21% 4-96%
Automation 4% 2-8%
Consolidated annual growth rates over a set of 280 U.S. companies for the period 2004-2007.
Current growth areas for manufacturing include logistic including material handling, and robotics.
Given the importance of manufacturing in general, it is essential to consider how technology such as
robotics can be leveraged to strengthen U.S. manufacturing industry.
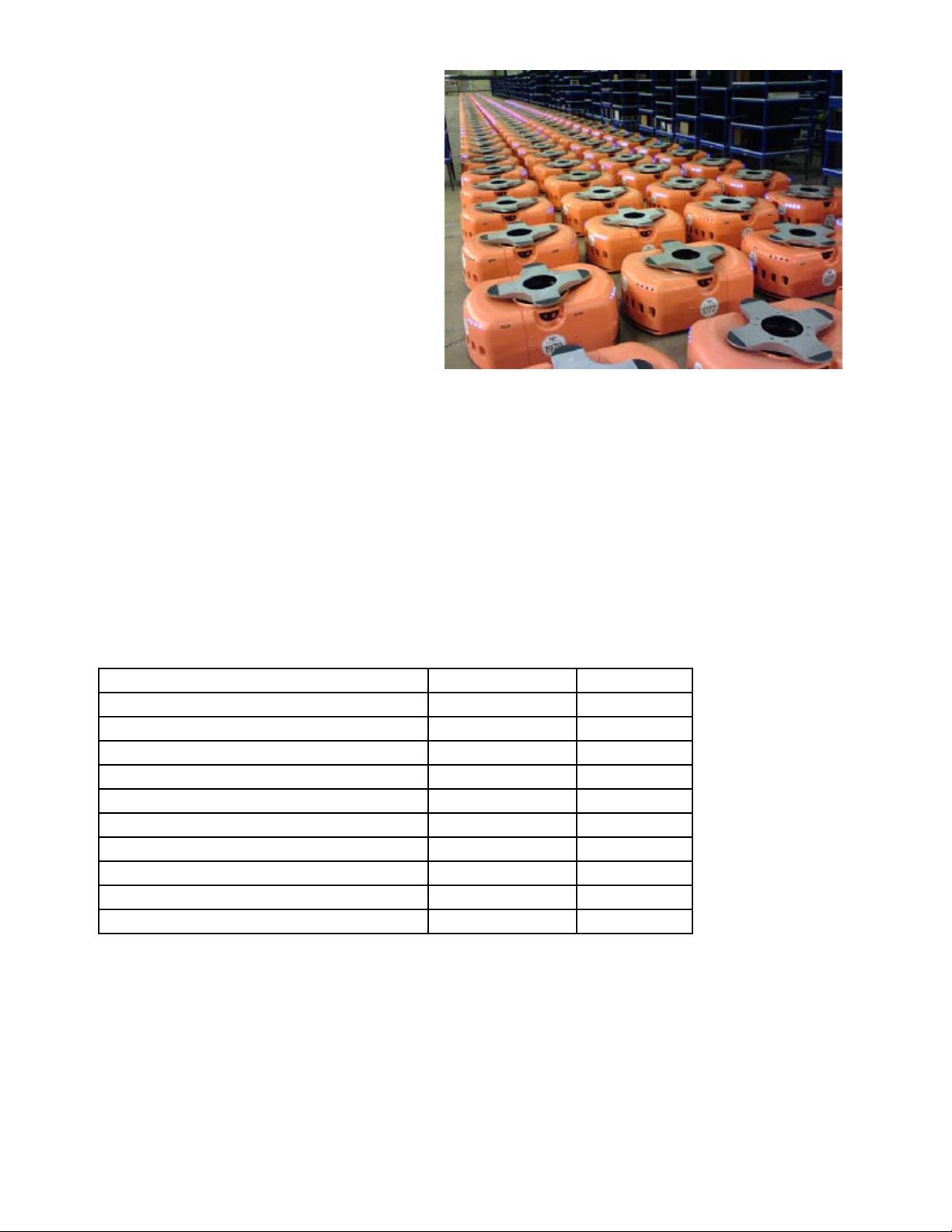
Novel Mobile robots are enabling new paradigms in logistics and warehouse
management with improved productivity, speed, accuracy, and flexibility.
(Source: KIVA Systems)



剩余93页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2015-03-07 上传
2021-08-14 上传
2021-03-15 上传
2021-10-24 上传
2021-08-14 上传

weixin_38744153
- 粉丝: 347
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- 火炬连体网络在MNIST的2D嵌入实现示例
- Angular插件增强Application Insights JavaScript SDK功能
- 实时三维重建:InfiniTAM的ros驱动应用
- Spring与Mybatis整合的配置与实践
- Vozy前端技术测试深入体验与模板参考
- React应用实现语音转文字功能介绍
- PHPMailer-6.6.4: PHP邮件收发类库的详细介绍
- Felineboard:为猫主人设计的交互式仪表板
- PGRFileManager:功能强大的开源Ajax文件管理器
- Pytest-Html定制测试报告与源代码封装教程
- Angular开发与部署指南:从创建到测试
- BASIC-BINARY-IPC系统:进程间通信的非阻塞接口
- LTK3D: Common Lisp中的基础3D图形实现
- Timer-Counter-Lister:官方源代码及更新发布
- Galaxia REST API:面向地球问题的解决方案
- Node.js模块:随机动物实例教程与源码解析
