
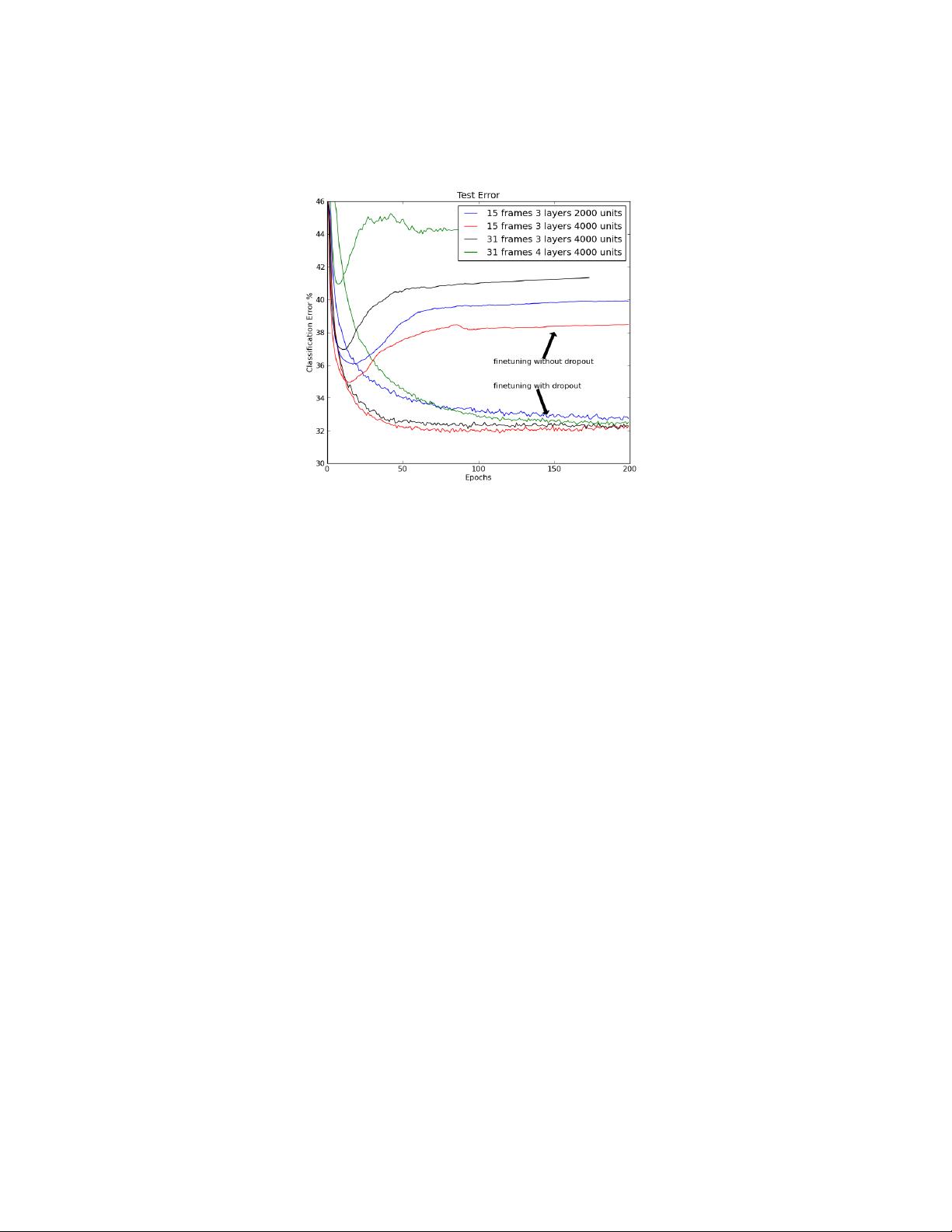
Fig. 2: The frame classification error rate on the core test set of the TIMIT benchmark. Com-
parison of standard and dropout finetuning for different network architectures. Dropout of 50%
of the hidden units and 20% of the input units improves classification.
layer and 185 “softmax” output units that are subsequently merged into the 39 distinct classes
used for the benchmark. Dropout of 50% of the hidden units significantly improves classifica-
tion for a variety of different network architectures (see figure 2). To get the frame recognition
rate, the class probabilities that the neural network outputs for each frame are given to a decoder
which knows about transition probabilities between HMM states and runs the Viterbi algorithm
to infer the single best sequence of HMM states. Without dropout, the recognition rate is 22.7%
and with dropout this improves to 19.7%, which is a record for methods that do not use any
information about speaker identity.
CIFAR-10 is a benchmark task for object recognition. It uses 32x32 downsampled color
images of 10 different object classes that were found by searching the web for the names of the
class (e.g. dog) or its subclasses (e.g. Golden Retriever). These images were labeled by hand
to produce 50,000 training images and 10,000 test images in which there is a single dominant
object that could plausibly be given the class name (9) (see figure 3). The best published error
rate on the test set, without using transformed data, is 18.5% (10). We achieved an error rate of
16.6% by using a neural network with three convolutional hidden layers interleaved with three
“max-pooling” layers that report the maximum activity in local pools of convolutional units.
These six layers were followed by one locally-connected layer (For details see Appendix D) .
Using dropout in the last hidden layer gives an error rate of 15.6%.
ImageNet is an extremely challenging object recognition dataset consisting of thousands of
high-resolution images of thousands of classes of object (11). In 2010, a subset of 1000 classes
with roughly 1000 examples per class was the basis of an object recognition competition in
4
剩余17页未读,继续阅读















