

2 1 Introduction and Overview
and other fields is necessary. Most research focuses on different selected methods and use
different formalisms, which makes them difficult to understand and hard to compare.
1.1 Goals and Contributions
The goal of this thesis is to build a framework for the simulation of rigid body dynamics. The
desired framework should exhibit these qualities:
• It should be suitable for usage in interactive 3d applications on standard PCs. So only fast
simulation methods that qualify for interactive and real-time applications are examined.
• The simulation results should be believable. Physical correctness is not the main goal, as long
as the results are felt to be realistic by a user of the application. This requires the
simulation to be stable and robust. Here, stability means that unrealistic motion due to
simulation errors is avoided. Robustness means that the simulation is able to recover from
user- or simulation-induced errors.
• The framework should be easy to use. The effort to understand and integrate rigid body
dynamics in an application should be low.
• And the framework should be independent of existing simulation methods or specific
physical effects – for several reasons: Without being an expert in this field it is impossible
to decide which simulation method is superior. An independent design facilitates the
understanding and comparison of different simulation methods. And hopefully it leads to
an improved design, which can be extended easily with new simulation methods and
physical effects.
With this goal at the horizon, the general contributions of this thesis can be summarized as:
• Basics – The fundamental and advanced concepts of mechanics, necessary to understand
and implement rigid body dynamics simulation, are summarized.
• Big Picture – A modular overview of the simulation process and an overview of state of the
art simulation methods are given.
• Detailed View – The important simulation methods are explained.
• Implementation – A design of a unified (simulation method independent) framework is
suggested.
1.2 Chapter Overview
This thesis is divided into the following chapters:
• Chapter 2, “Basics”, summarizes the basics of physics, which are necessary to simulate
rigid bodies. Additionally the linear complementarity problem is introduced, which is a key
problem in rigid body dynamics.
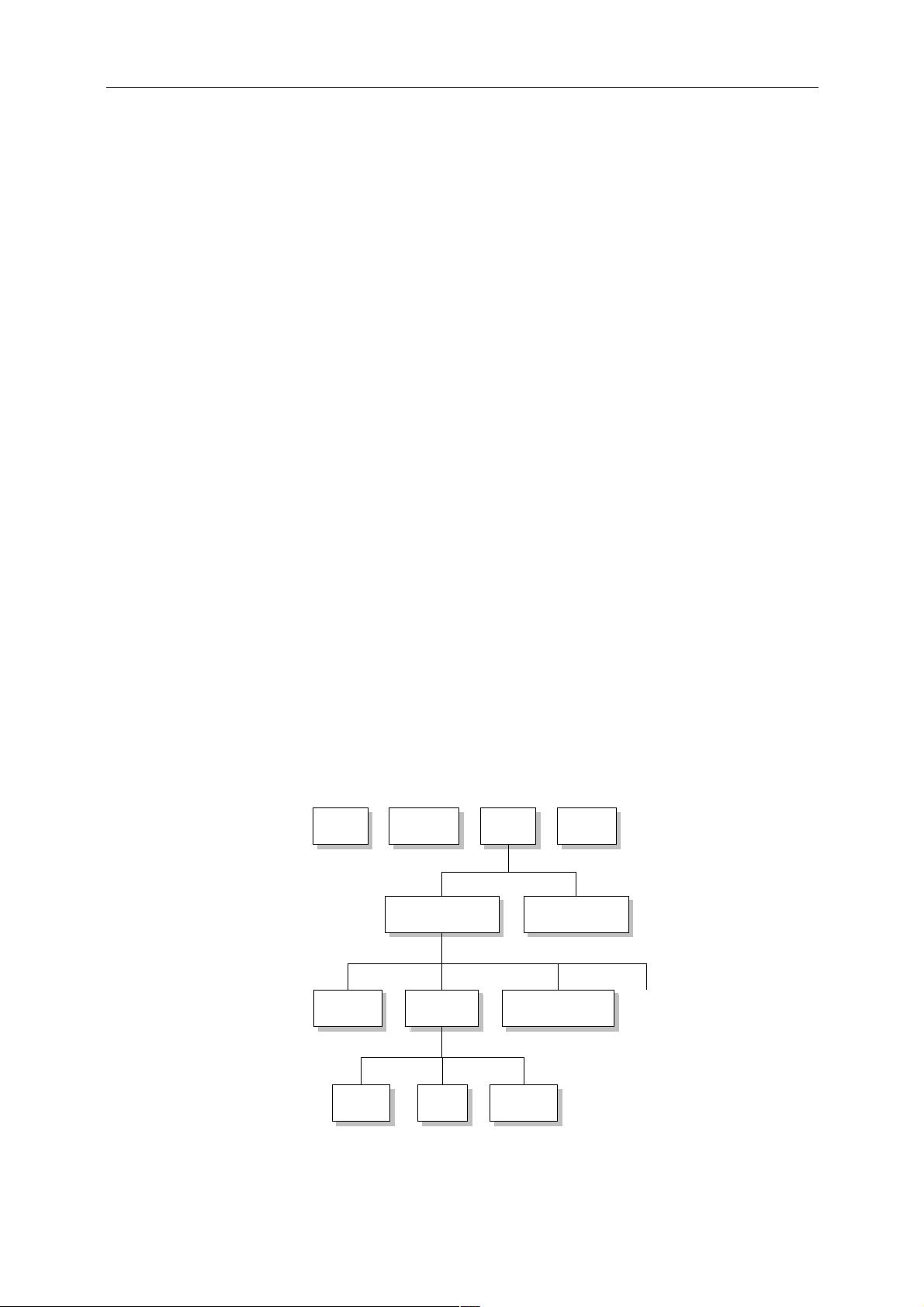
• Chapter 3, “Simulation Overview”, shows a modular overview of the simulation process.



剩余152页未读,继续阅读

大侠饶命
- 粉丝: 3
- 资源: 27
 我的内容管理
收起
我的内容管理
收起
- 我的资源
快来上传第一个资源
 我的收益 登录查看自己的收益
我的收益 登录查看自己的收益 我的积分
登录查看自己的积分
我的积分
登录查看自己的积分
 我的C币
登录后查看C币余额
我的C币
登录后查看C币余额
 我的收藏
我的收藏  我的下载
我的下载  下载帮助
下载帮助

会员权益专享




最新资源
- VMP技术解析:Handle块优化与壳模板初始化
- C++ Primer 第四版更新:现代编程风格与标准库
- 计算机系统基础实验:缓冲区溢出攻击(Lab3)
- 中国结算网上业务平台:证券登记操作详解与常见问题
- FPGA驱动的五子棋博弈系统:加速与创新娱乐体验
- 多旋翼飞行器定点位置控制器设计实验
- 基于流量预测与潮汐效应的动态载频优化策略
- SQL练习:查询分析与高级操作
- 海底数据中心散热优化:从MATLAB到动态模拟
- 移动应用作业:MyDiaryBook - Google Material Design 日记APP
- Linux提权技术详解:从内核漏洞到Sudo配置错误
- 93分钟快速入门 LaTeX:从入门到实践
- 5G测试新挑战与罗德与施瓦茨解决方案
- EAS系统性能优化与故障诊断指南
- Java并发编程:JUC核心概念解析与应用
- 数据结构实验报告:基于不同存储结构的线性表和树实现
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


