使用ROS实现键盘控制机器人的步骤详解
版权申诉
29 浏览量
更新于2024-06-23
收藏 2.88MB DOCX 举报
"ROS机器人操作系统"
ROS (Robot Operating System) 是一个开源操作系统,专门设计用于机器人技术,它提供了软件框架、工具和库,使得机器人开发者能够方便地构建、编写和运行各种机器人应用程序。ROS的主要目标是促进软硬件系统的模块化、可重用性和互操作性,从而简化机器人开发过程。
在ROS中,`rviz` 是一个强大的可视化工具,可以用来显示机器人的状态、传感器数据以及进行参数配置等。`urdf.vcg` 文件是rviz的配置文件,当我们在rviz中调整界面或参数并保存时,该文件会自动更新,记录这些定制设置。
创建ROS包是开发过程中常见的第一步。在这个例子中,创建了一个名为`smartcar_teleop`的包,用于实现键盘控制功能。使用`roscreate-pkg`命令创建包,并添加依赖的库,如`rospy`、`geometry_msgs`、`std_msgs` 和 `roscpp`。
`rosmake` 命令是用来编译ROS包的,确保所有依赖的代码都已正确构建。
在ROS中,控制机器人运动通常涉及到发布`Twist`消息到`cmd_vel`主题。`Twist`消息包含了线性和旋转速度,分别代表机器人的直线速度和角速度。在提供的代码中,创建了一个`Teleop`类,该类初始化了一个`rospy.Publisher`对象,用于向`cmd_vel`主题发布`Twist`消息。
`rospy.Rate`对象用于控制程序的执行速率,确保消息按照指定的频率发布。在示例代码中,`rate=rospy.Rate(1)`表示每秒发布一次消息。
在`Teleop`类的实例化过程中,创建了一个`Twist`对象`cmd`,并设置了初始的线性速度(`linear.x`)为0.2,这意味着机器人将以0.2米/秒的速度向前移动。线性y和z轴速度通常用于左右和垂直移动,但在这个例子中它们被设置为0,表示机器人只会在x轴方向上移动。未显示的代码可能包含了键盘事件处理,根据用户输入改变`cmd`的速度值,然后发布更新后的`Twist`消息。
通过这种方式,ROS允许开发者轻松地创建键盘控制的机器人应用,使得能够实时调整机器人的运动。这种模块化的架构和丰富的库使得ROS成为机器人开发领域广泛采用的标准。

操作杆控制
对于移动机器人,键盘的控制往往满足不了我们的需求,以前看好多电影里边都是用一
个摇杆来控制机器人的,简直帅爆了,正好我这里有一个操作杆,那就来尝试感受一下。
操作杆(joystick)控制会更加有操作感,ROS 中的很多机器人也带有操作杆的相关代码,
只需要简单的移植即可。我们使用的是赛钛客(saitek)的一款操作杆,如下图所示:
使用的移植代码是 clearpath_husky 机器人中的 python 代码。
一、测试操作杆驱动
首先将操作杆的接口插入电脑,然后在终端中输入:
01.ls /dev/input/
显示如下:
其中的 js0 就代表我们的操作杆。然后测试操作杆的操作是否有效,输入:
01.sudo jstest /dev/input/js0
然后会在终端中显示操作杆的各个控制值的即时值,操作操作杆,如果每个按键和操作
都有效,说明操作杆是正常的。最后在 ROS 中的节点里进行测试。打开 joy 节点:
01.rosrun joy joy_node
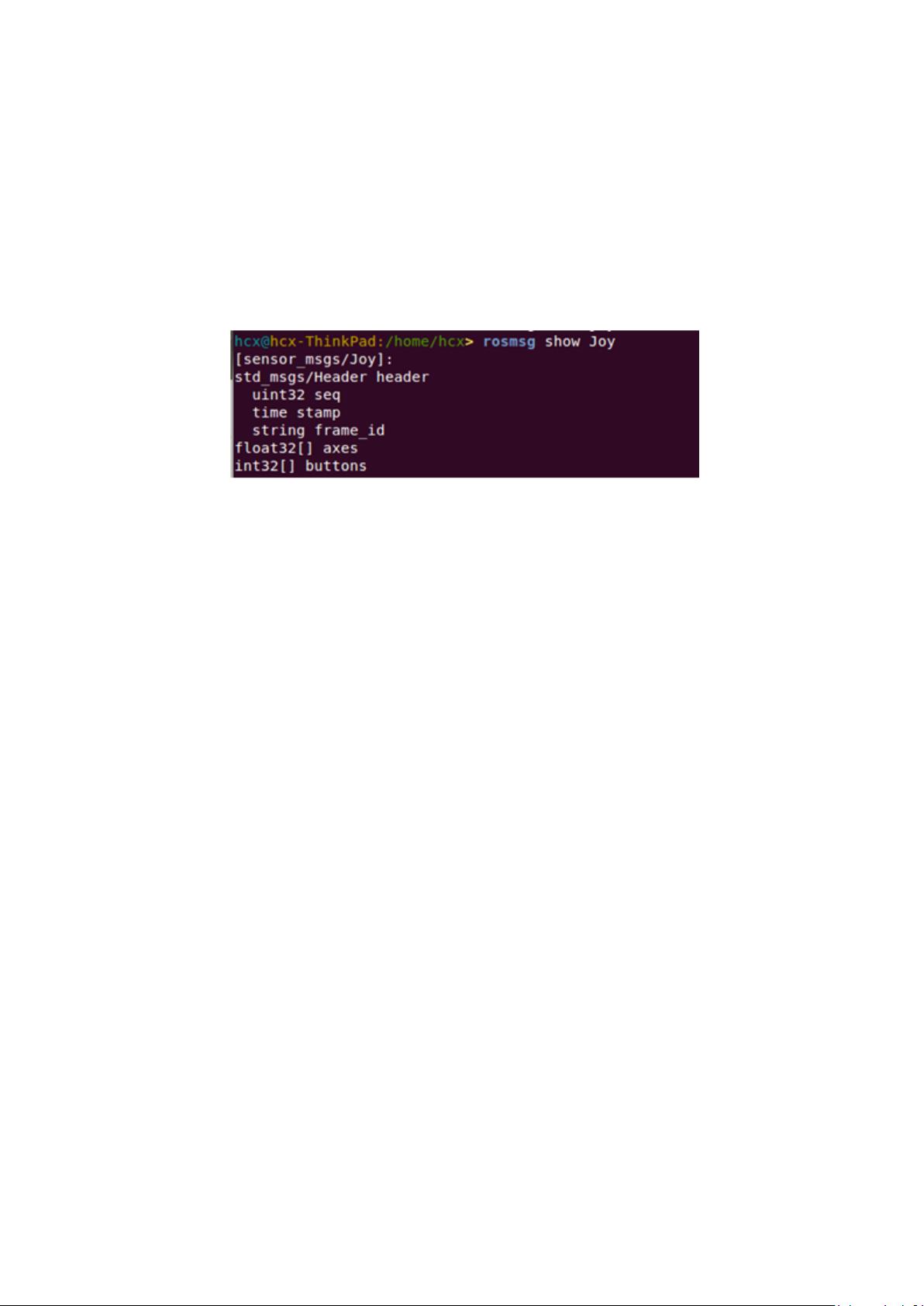
再打开一个窗口,输入下面命令,查看数据:
01.rostopic echo joy

剩余69页未读,继续阅读
2022-06-22 上传
2021-08-01 上传
2023-02-27 上传
2022-10-29 上传
2022-11-29 上传

老帽爬新坡
- 粉丝: 98
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







