SQ电机控制程序解析与流程
需积分: 10 103 浏览量
更新于2024-09-02
收藏 236KB DOCX 举报
"该文档是关于SQ电机程序流程的一个详细梳理,主要涉及到嵌入式系统中的电机控制逻辑。文档以200毫秒为周期执行的任务App_TaskStates为核心,涵盖了一系列电机运行状态的初始化、错误处理、编码器的使用以及根据特定条件控制电机的启停。其中,错误检测和编码器的读取数据是关键环节,用于判断电机的运行状态并做出相应的控制决策。"
在嵌入式系统中,电机控制通常基于微控制器或者单片机,而`App_TaskStates`是一个定时任务,它每200毫秒执行一次,用于管理电机的运行状态。首先,这个任务会执行`data_init()`函数,这是对系统中各种端口状态的初始化操作,包括设置初始值、配置中断、设定I/O引脚方向等,确保电机控制系统的正常运行环境。
接下来,`Error_out()`函数被调用,用于检查可能出现的错误状态并将这些状态记录在`test[64]`数组中。如果在检查过程中发现错误码,意味着系统存在异常,此时会触发电机停转,以防止设备损坏或安全风险。
编码器是电机控制中的重要组成部分,它提供了精确的位置和速度反馈。文档中提到的`c_entry_Encoder2()`很可能是编码器的入口函数,用于读取编码器的计数值,进而计算电机的位置和速度,这些信息对于闭环控制至关重要。
`key_mlx90363`似乎是某种传感器或输入设备,可能用于用户交互或者监测电机的状态。它的`READ_run`变量根据不同的范围值,会影响到电机的启停。例如,当`READ_run`值在5到995之间时,会设置`flag_MOTOR_Run`标志,表示电机可以运行。根据不同的`encoder.num`情况,电机的打开或关闭命令也会相应改变,如在某些情况下,`READ_run`超过995且小于1200时,会设置`flag_MOTOR_Close`,使电机关闭;而当`READ_run`处于0到5之间或`Run_dir`为0时,会设置`flag_MOTOR_Open`,使电机开启。
此程序流程的设计考虑了多种可能的运行情境,通过灵活地设置不同条件下的电机控制标志,实现了对电机精细化的控制。这种控制策略可以应用于各种应用场景,如工业自动化、机器人运动控制等,确保电机能够按照预期的工作模式稳定运行。
SQ
App_TaskStart
1 App_TaskStates
编码器入口
2 App_TaskGUI
图形界面
3 App_TaskUART
通信握手、电机状态交互
4 App_TaskUART0
encoder 开关状态选择
5 App_TaskUART2
模数温度转换
一 App_TaskStates(周期 200ms)
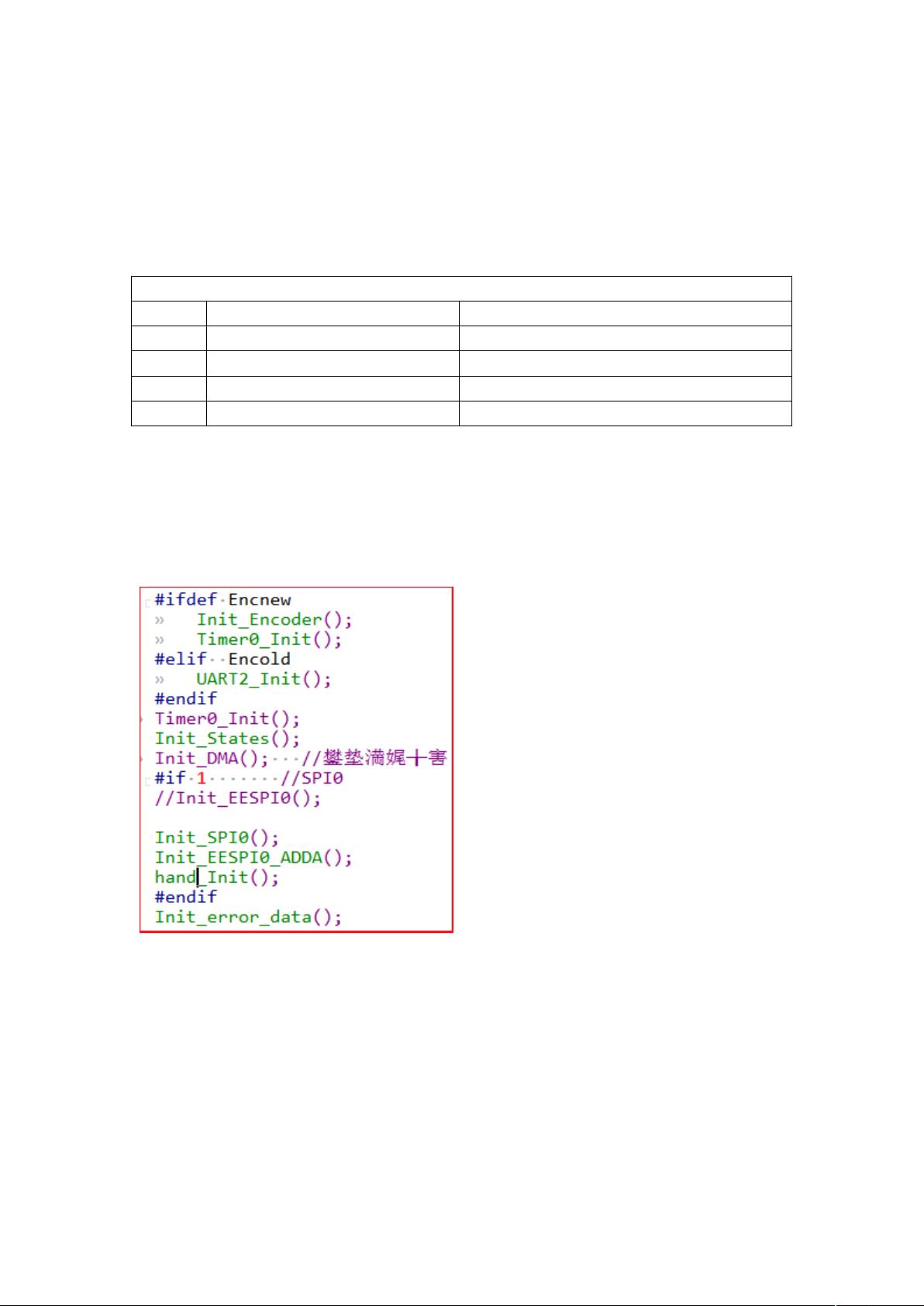
(1)各种端口状态初始化:
(2)检查各种错误状态,并记录到 test[64]数组中:data_init();
(3)根据检索 test[64]数组,进行校验,若存在错误码,则电机停转:Error_out();
(4)编码器入口函数:c_entry_Encoder2();
if((key_mlx90363.READ_run>=5)&&(key_mlx90363.READ_run<=995))
motorset.flag_MOTOR_Run=1;
switch(encoder.num)
case 1:case 4:
if((key_mlx90363.READ_run>995)&&(key_mlx90363.READ_run<=1200))
motorset.flag_MOTOR_Open=1;
下载后可阅读完整内容,剩余7页未读,立即下载
2022-06-12 上传
2022-05-23 上传

公子无缘
- 粉丝: 1w+
- 资源: 25
 我的内容管理
展开
我的内容管理
展开







最新资源
- Fisher Iris Setosa数据的主成分分析及可视化- Matlab实现
- 深入理解JavaScript类与面向对象编程
- Argspect-0.0.1版本Python包发布与使用说明
- OpenNetAdmin v09.07.15 PHP项目源码下载
- 掌握Node.js: 构建高性能Web服务器与应用程序
- Matlab矢量绘图工具:polarG函数使用详解
- 实现Vue.js中PDF文件的签名显示功能
- 开源项目PSPSolver:资源约束调度问题求解器库
- 探索vwru系统:大众的虚拟现实招聘平台
- 深入理解cJSON:案例与源文件解析
- 多边形扩展算法在MATLAB中的应用与实现
- 用React类组件创建迷你待办事项列表指南
- Python库setuptools-58.5.3助力高效开发
- fmfiles工具:在MATLAB中查找丢失文件并列出错误
- 老枪二级域名系统PHP源码简易版发布
- 探索DOSGUI开源库:C/C++图形界面开发新篇章
