上下双相机定位贴合与标定技术解析
需积分: 15 44 浏览量
更新于2024-07-15
收藏 3.75MB DOCX 举报
"这篇文档是关于视觉相机标定的综合教程,主要涵盖了机械手和相机的标定,特别强调了上下双相机在定位贴合中的应用。内容包括理论基础、HALCON源码解析以及实际操作步骤,适用于多轴系统,如Scara四轴机器和六轴机器人。"
在视觉系统中,相机标定是一项至关重要的任务,它确保了从图像坐标系到世界坐标系的精确转换。本文档详细讲解了两种不同的标定模型:相机固定和相机移动。
1. 相机固定标定(模型A):
在这种情况下,相机保持不动,而被测物体或夹具在X、Y轴上移动。标定过程涉及收集多个位置的轴坐标和对应的图像坐标,通常采用九点标定法。九点标定利用了仿射变换,通过至少三个非共线点来近似真实的空间变换。Halcon的`vector_to_hom_mat2d`算子用于将这些点坐标转换为归一化 homography 矩阵(HomMat2D),用于后续的坐标转换。但要注意,这种方法无法完全纠正镜头畸变。
2. 相机移动标定(模型B):
相机安装在X或Y轴上,可以沿着这些轴移动,但不允许旋转。这种标定方式适用于许多工业设备,其中相机随着工作台一起移动,例如Z轴可能包含在移动部件中。标定过程与模型A类似,但由于相机移动,需要考虑相机位置的变化。
文档中还提到了HALCON的源码实现,这对于开发者来说是一个实用的补充,因为HALCON是一个广泛应用的机器视觉软件,其源码解析可以帮助理解算法的实际运作。HALCON提供了丰富的图像处理和标定工具,使得开发者能有效地解决各种视觉问题。
此外,上下双相机定位贴合的介绍特别适合那些需要在三维空间中精确定位和对准的应用,比如电子产品组装、自动化包装等。这种系统通常由两个相机从不同角度捕获图像,然后通过图像处理技术确定物体的位置和姿态,以便进行精确的贴合或装配。
通过了解这些概念,工程师可以更准确地校正相机的几何失真,提高测量精度,确保机器人或其他自动化设备在执行任务时能够准确地定位目标。整个标定过程不仅包括数学模型的建立,还包括实际操作中的数据采集和参数调整,对于优化机器视觉系统的性能至关重要。
[/td][/tr][/table]
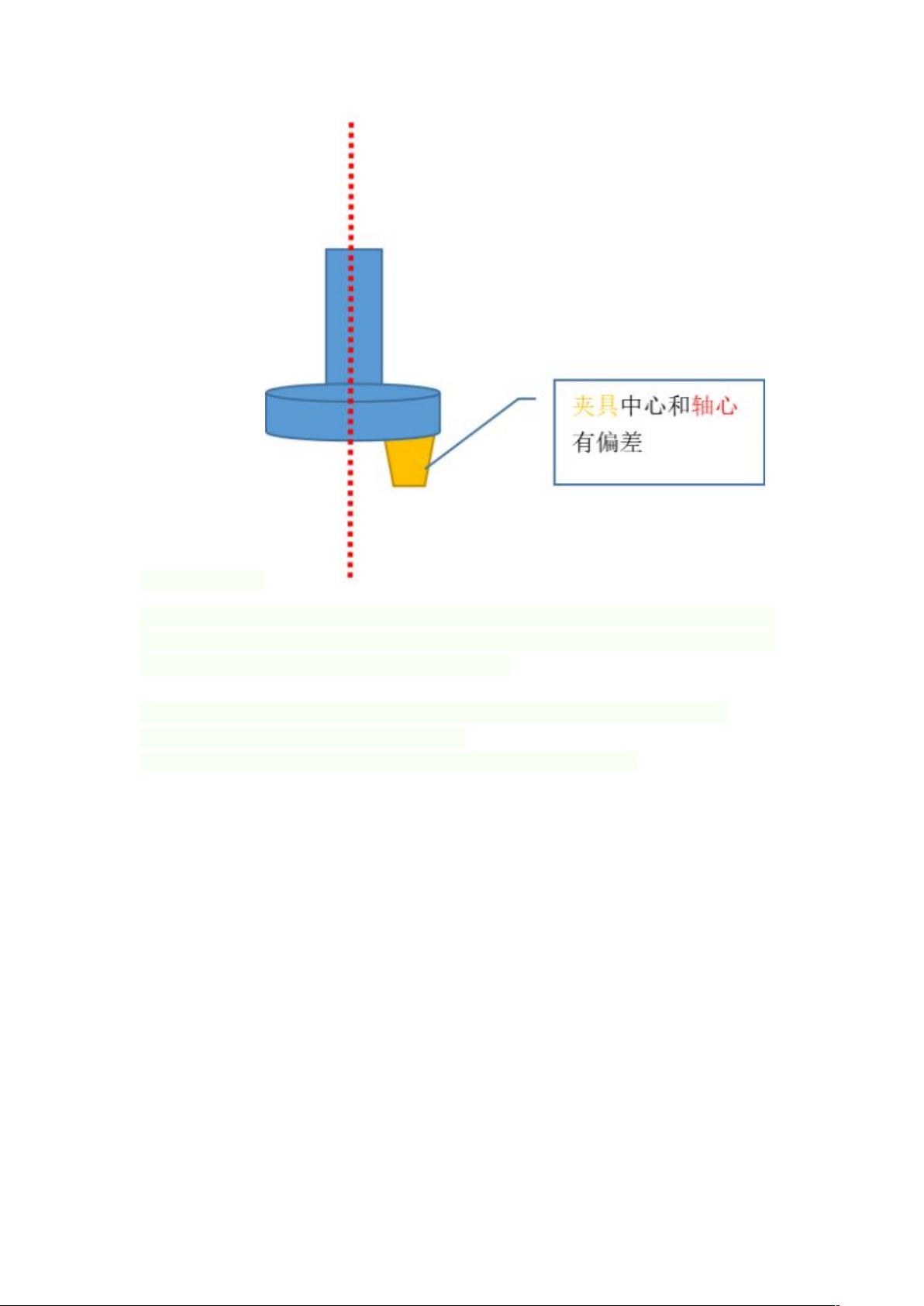
这是一个放大的模型,轴心和夹具中心不重合,就算我们的夹具中心和旋转轴中心是重合,但
是我们夹取或者吸取产品也不能保证产品的中心和旋转中心重合,所以结论:涉及旋转必须进
行旋转标定,不然每次贴合总会带有旋转产生的误差。
下面分析这个旋转到底是怎样带来误差的,也就是我们旋转标定到底在计算什么东西。
这一部分也同时解释怎样去补偿这个旋转误差。
[table=100%][tr][td=1,1,99.3] [/td][/tr][tr][td] [/td][td]
剩余21页未读,继续阅读
2023-06-19 上传
2021-12-22 上传
2023-04-30 上传

RulingYan
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- vcworks 5.4 技术文档
- TCP-IP Sockets in Java - Practical Guide for Programmers [Academic-Press 2002, Scan].pdf
- PHP实战(英文高清版)
- 大型网站架构演变和知识体系.pdf
- PHP面向对象编程(英文原版高清)
- C语言设计.第三版.谭浩强.
- IT 管理需求分析说明书
- flex 中文开发文档,基本原理和应用
- 网络教程(服务器)服务器
- Keil实例教程.pdf
- Linux内核结构详解教程.pdf
- CSS+DIV布局大全
- DWR基本原理、编程方法和例子
- 报表工具 xx x
- MYSQL中文乱码 xx
- 基于数码相机的三维物体空间几何位置的摄影测量
