动态规划加速原理:四边形不等式与单调性
"本文主要介绍了动态规划加速原理中的四边形不等式,以及它在解决动态规划问题中的应用。四边形不等式是优化算法中一个重要的理论基础,尤其在处理区间包含的单调性和权重关系时发挥关键作用。"
在动态规划问题中,四边形不等式是一个非常重要的概念,它可以帮助我们加速求解过程并优化算法的效率。四边形不等式的基本理论源于数学中的几何思想,通过这个不等式,我们可以更好地理解和处理具有特定性质的状态转移问题。
状态转移方程(1.1)通常用于表示动态规划中的最优解,其中`mij`代表从状态i到状态j的最优点,`wij`代表从状态i到状态j的代价或权重。如果函数w满足区间包含的单调性,即对于任意的i和j,如果i' ≤ i且j ≤ j',则有`wij ≤ wij'`,这意味着代价随着状态范围的扩大而增加或保持不变。
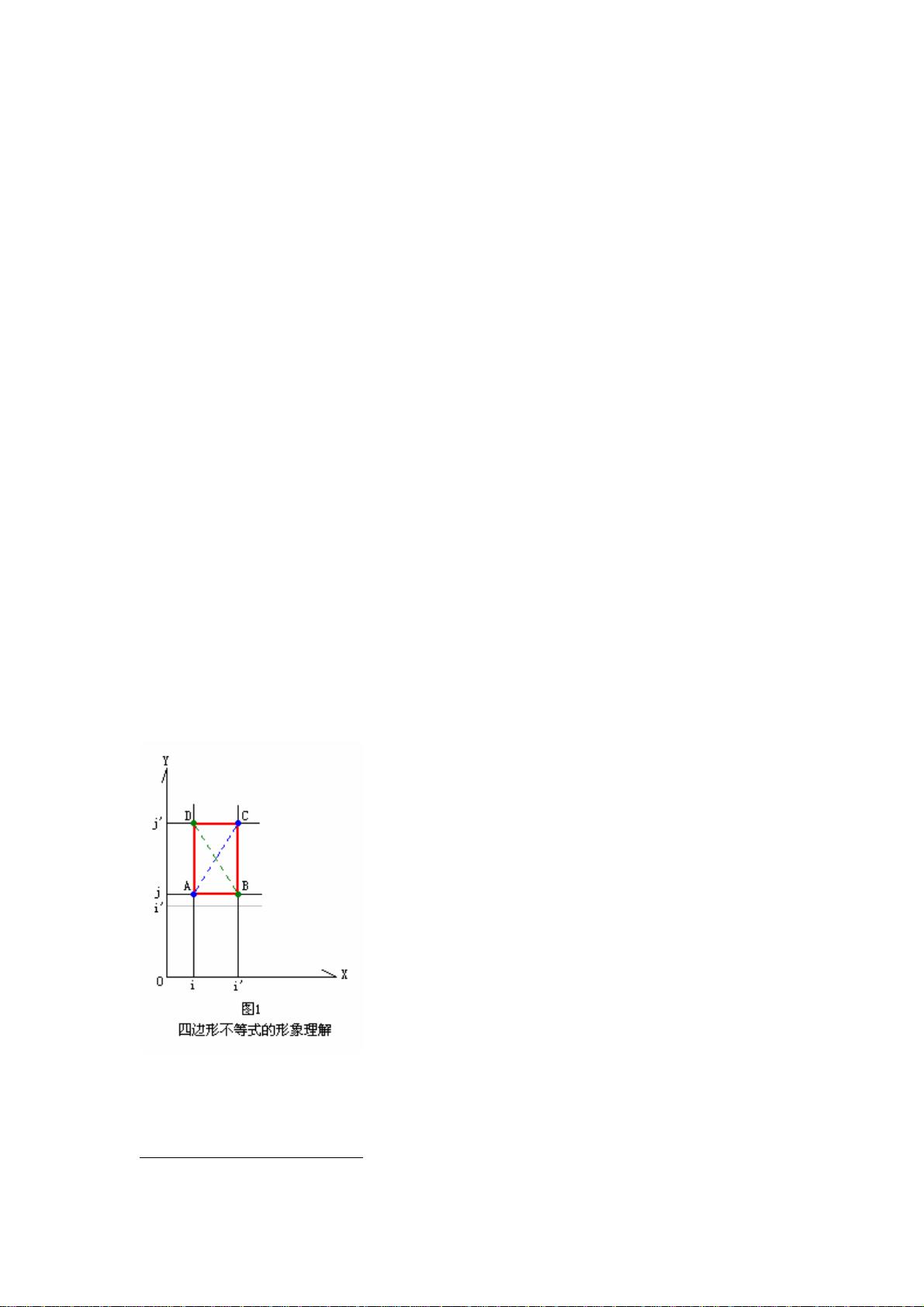
此外,如果函数w还满足四边形不等式(1.2),即对于任意的i, j, i', j',都有`wij + wij' ≤ wii' + wjj'`,这相当于在四边形ABCD中,对角线AC的端点权值之和不大于对角线BD的端点权值之和。这种几何解释有助于直观理解四边形不等式的含义。
定理1指出,如果函数w同时满足区间包含的单调性和四边形不等式,那么由w计算出的函数m也会满足四边形不等式。这对于证明动态规划问题的最优性至关重要,因为这意味着在状态空间中,通过四边形不等式,我们可以快速地估计中间状态的最优值,而无需实际计算所有这些状态。
证明定理1通常采用归纳法。在归纳过程中,我们会考虑不同情况,比如当i=i'或j=j'时,四边形不等式自然成立。对于其他情况,可以通过构建辅助函数(如`t`)并利用反三角形式来逐步推导,确保不等式的正确性。
在实际应用中,如“最小代价子母树”问题,四边形不等式可以帮助我们避免不必要的计算,提高算法的运行速度。通过合理利用四边形不等式,我们可以在保证找到全局最优解的同时,减少计算复杂度,这是动态规划中一种强大的优化技巧。
总结来说,四边形不等式是动态规划领域的一个核心工具,它能够帮助我们在处理具有特定结构的优化问题时,有效地剪枝和加速算法的执行。通过对四边形不等式的深入理解和应用,我们可以设计出更高效、更精准的动态规划解决方案。
动态规划加速原理之四边形不等式
华中师大一附中 赵爽
一、四边形不等式基本理论
在动态规划问题中,有一个常见的状态转移方程
①
:
( )
(
)
(
)
(
)
{
}
min,1,,,
,0,
,
ikj
mikmkjwijij
mijij
ij
<≤
−++<
==
∞>
(1.1)
例如“最小代价子母树”问题,都用到了这个式子。假如对于
iijj
′′
≤<≤
,有
(
)
(
)
,,
wijwij
′′
≤ ,那么我们称函数
w
满足关于区间包含的单调性。另外,假如有:
(
)
(
)
(
)
(
)
,,,,
wijwijwijwij
′′′′
+≤+ (1.2)
那么我们称函数
w
满足四边形不等式。
例如在“最小代价子母树”问题中,有
(
)
(
)
(
)
(
)
,,,,
wijwijwijwij
′′′′
+=+。因此该问题
中函数
w
是满足四边形不等式的。
左图是四边形不等式的一种形象化理解。上面的不等
式在图中可以看作在四边形 ABCD 中,对角线 AC 两个端
点的权值之和,不大于对角线 BD 两个端点的权值之和。
我们下面要研究的问题,是在
w
既满足关于区间包含
的单调性,又满足四边形不等式的前提下进行的。
【定理 1】假如函数
w
满足上述条件,那么函数
m
也满足
四边形不等式,即
(
)
(
)
(
)
(
)
,,,,
mijmijmijmij
′′′′
+≤+,
iijj
′′
≤<≤
证明:
当
ii
′
=
或
jj
′
=
时,显然有
(
)
(
)
(
)
(
)
,,,,
mijmijmijmij
′′′′
+=+,不等式成立。
①
对于不同的问题,
(
)
,
mij
的边界取值可能不同。这对我们讨论的问题没有影响。
下载后可阅读完整内容,剩余5页未读,立即下载
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
2013-12-09 上传

JCStaff
- 粉丝: 1
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- Python中快速友好的MessagePack序列化库msgspec
- 大学生社团管理系统设计与实现
- 基于Netbeans和JavaFX的宿舍管理系统开发与实践
- NodeJS打造Discord机器人:kazzcord功能全解析
- 小学教学与管理一体化:校务管理系统v***
- AppDeploy neXtGen:无需代理的Windows AD集成软件自动分发
- 基于SSM和JSP技术的网上商城系统开发
- 探索ANOIRA16的GitHub托管测试网站之路
- 语音性别识别:机器学习模型的精确度提升策略
- 利用MATLAB代码让古董486电脑焕发新生
- Erlang VM上的分布式生命游戏实现与Elixir设计
- 一键下载管理 - Go to Downloads-crx插件
- Java SSM框架开发的客户关系管理系统
- 使用SQL数据库和Django开发应用程序指南
- Spring Security实战指南:详细示例与应用
- Quarkus项目测试展示柜:Cucumber与FitNesse实践
