"基于飞思卡尔单片机的自动循迹小车控制设计研究"
85 浏览量
更新于2024-01-27
收藏 1.13MB DOC 举报
毕业设计(论文)-基于飞思卡尔单片机自动循迹小车控制的设计.doc;毕业设计(论文)-基于飞思卡尔单片机自动循迹小车控制的设计.doc;基于飞思卡尔单片机自动循迹小车控制的设计- I -摘要随着我国的电子科技的不断发展,我们生活中的自动化设备越来越多,也为嵌入式在智能化上的研究提供了一个广阔的平台。本系统以MK60DN512VMD100微控制器为核心控制单元,选用OV7620 CMOS模拟摄像头检测赛道信息,高速AD转换芯片选用TCL5510,将提取后的灰度图像进行软件二值化,进而提取赛道信息;用光电编码器实时检测小车的实时速度,采用PID控制算法调节电机的速度以及舵机转向,从而实现速度和方向的闭环控制。
关键字:MK60DN512VMD100,OV7620 CMOS,软件二值化,PID
基于飞思卡尔单片机自动循迹小车控制的设计- II -Abstract
With the continuous development of electronic technology, more and more automation equipment has been integrated into our daily lives, providing a broad platform for the study of embedded systems in intelligent applications. This system is designed with MK60DN512VMD100 microcontroller as the core control unit. The OV7620 CMOS analog camera is used to detect track information, and the high-speed AD conversion chip TCL5510 is used to perform software binarization on the extracted grayscale images to extract track information. The speed of the car is detected in real-time using the photoelectric encoder, and the PID control algorithm is employed to adjust the motor speed and steering of the servo to achieve closed-loop control of speed and direction.
Keywords: MK60DN512VMD100, OV7620 CMOS, software binarization, PID
本文描述了一种基于飞思卡尔单片机的自动循迹小车控制系统设计。通过使用MK60DN512VMD100微控制器作为核心控制单元,该系统能够实现对小车速度和方向的精确控制。为了检测赛道信息,选用了OV7620 CMOS模拟摄像头,并使用TCL5510高速AD转换芯片对提取后的灰度图像进行软件二值化,通过这种方式得到了赛道的二值化图像,并能够提取赛道信息。此外,光电编码器用于实时检测小车的速度。最后,采用PID控制算法将检测到的速度信息与设定的速度进行比较,并通过调节电机速度和舵机转向来实现速度和方向的闭环控制。
本设计具有以下优点:首先,通过使用飞思卡尔单片机作为核心控制单元,系统具有较低的功耗和较高的稳定性。其次,使用CMOS模拟摄像头进行赛道信息检测,能够实时获取赛道情况,提高了车辆的准确性和稳定性。最后,采用PID控制算法能够快速且精确地调节电机速度和舵机转向,从而实现对小车的精确控制。
通过本设计,我们可以看到嵌入式系统在自动化领域的广泛应用。自动循迹小车是嵌入式系统的一个典型应用,通过使用飞思卡尔单片机和相关的传感器和控制器,能够实现对小车速度和方向的精确控制,可以应用于工业自动化、物流和仓储等领域。随着电子科技的不断发展,嵌入式系统的研究和应用领域也会越来越广阔,将为人们的生活带来更多便利和舒适。
基于飞思卡尔单片机自动循迹小车控制的设计
`
3
2 飞思卡尔单片机自动循迹小车系统设计总方案
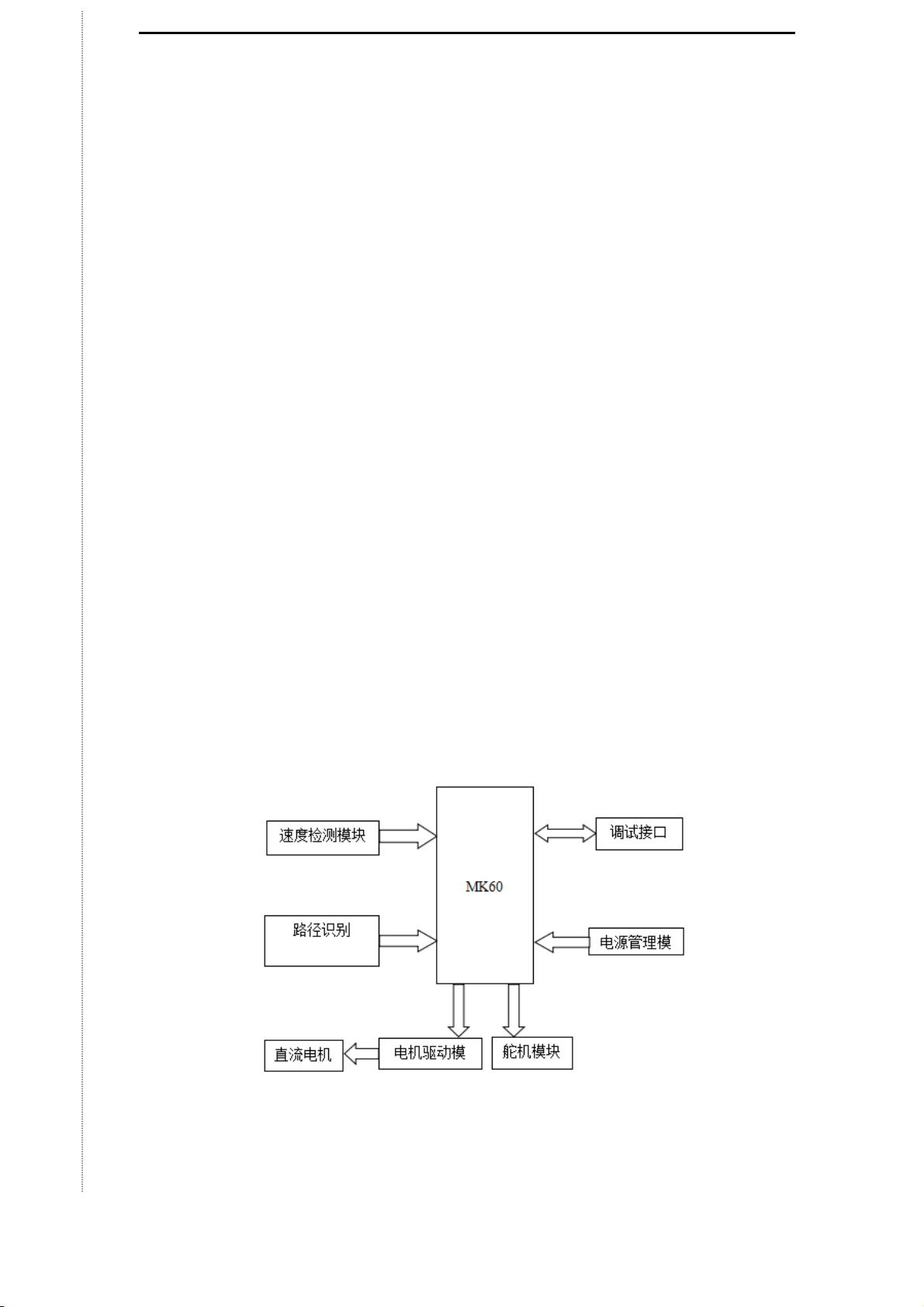
本设计的核心是基于 K60 的主控模块,车速由电机驱动模块控制、转向问题
由舵机模块来控制、小车速度的检测交由测速传感器模块的检测,预判行进的路
线由路径识别模块来决定。本设计实现的功能是在特定的跑道上小车自动行驶,
完成在转弯处减速、在直道上加速行驶。本系统由两部分组成即硬件部分和软件
部分。
2.1 系统硬件部分
本毕业设计选用飞思卡尔公司推出的 32 位 K60 微控器作为小车的核心控制
单元。路径识别模块采用摄像头检测技术,将采集到的图像信息转化成电平信号
送给微控单元 K60。同时速度检测模块收集到的信息同样转换成电平信号送给微
控单元 K60。微控单元经过内部的处理,输出 PWM 信号,控制电机转速以及舵
机转向,达到控制速度和自动行驶的目的。
要使智能小车又快又稳的行驶,不仅要控制好舵机的转向还要控制好车速。
这样才能使小车在转弯的时候不会因为速度太快而偏离跑道,因此我们需要检测
小车的速度,并且采取闭环的反馈机制。同时要求我们要将路径检测、车速控制
以及控制转向的各个单元精密结合起来。如果传感器采集到了错误的信息,或者
伺服电动机的控制出现偏差,就可能使小车出现严重的抖动,常出现的问题是小
车偏离跑道;如果直流电动机的控制效果不理想,还会造成小车速度过慢等问题。
本部小车的系统总体结构如图 2.1 所示:
图 2.1 系统总体结构图

剩余35页未读,继续阅读
118 浏览量
2023-07-06 上传
2023-07-09 上传
2023-07-06 上传
2021-10-02 上传
点击了解资源详情
2021-09-26 上传

黑色的迷迭香
- 粉丝: 809
 我的内容管理
展开
我的内容管理
展开







最新资源
- 易酷免费影视系统:开源网站代码与简易后台管理
- Coursera美国人口普查数据集及使用指南解析
- 德加拉6800卡监控:性能评测与使用指南
- 深度解析OFDM关键技术及其在通信中的应用
- 适用于Windows7 64位和CAD2008的truetable工具
- WM9714声卡与DW9000网卡数据手册解析
- Sqoop 1.99.3版本Hadoop 2.0.0环境配置指南
- 《Super Spicy Gun Game》游戏开发资料库:Unity 2019.4.18f1
- 精易会员浏览器:小尺寸多功能抓包工具
- MySQL安装与故障排除及代码编写全攻略
- C#与SQL2000实现的银行储蓄管理系统开发教程
- 解决Windows下Pthread.dll缺失问题的方法
- I386文件深度解析与oki5530驱动应用
- PCB涂覆OSP工艺应用技术资源下载
- 三菱PLC自动调试台程序实例解析
- 解决OpenCV 3.1编译难题:配置必要的库文件
