UHF RFID与激光融合:移动目标定位的新方法
2 浏览量
更新于2024-07-15
收藏 2.34MB PDF 举报
本篇研究论文标题为《基于UHF RFID相位和激光聚类的运动对象定位》,主要探讨了在无线射频识别(Radio Frequency Identification,RFID)技术的基础上提升物体定位精度的新方法。RFID作为一种非接触式的识别技术,具有广泛的应用前景,如物流管理、资产追踪等,但其主要缺点在于缺乏提供距离和方向信息的能力,导致定位精度受限。
论文作者Yulu Fu、Changlong Wang、Ran Liu、Gaoli Liang、Hua Zhang和Shafiq Ur Rehman针对这一问题,提出了结合UHF(Ultra High Frequency)RFID的相位测量与激光技术进行运动物体定位的创新策略。他们采用了粒子滤波器(Particle Filter),这是一种在处理高维动态系统中具有优势的估计方法,尤其适用于存在不确定性环境下的目标跟踪。
粒子滤波器通过模拟大量可能的运动状态,结合RFID信号的接收强度变化,计算出每个粒子代表的物体位置概率分布。UHF RFID的相位信息可以提供关于信号传播的微小变化,这些变化与物体的距离和方向有密切关系,通过处理这些数据,可以推断出物体的移动轨迹和位置。
同时,激光技术在此过程中可能扮演辅助角色,通过提供更精确的环境几何信息,比如激光测距或激光扫描数据,进一步增强定位的准确性。将RFID的相对距离估计和激光的绝对定位相结合,可以弥补RFID单一技术的不足,提高整体定位系统的性能。
论文的研究方法不仅关注理论模型的建立,还可能涉及实际硬件的实验验证,以确保在复杂环境中实现可靠和高效的运动物体定位。通过这种方法,研究者旨在突破RFID定位的局限性,为物联网(IoT)和智能物流等领域提供更为精确的定位服务,从而推动相关行业的发展和应用创新。该研究于2018年1月16日收到初步提交,3月6日被接受,并于3月9日发表,表明其研究成果具有较高的学术价值和实用性。
Sensors 2018, 18, 825 4 of 18
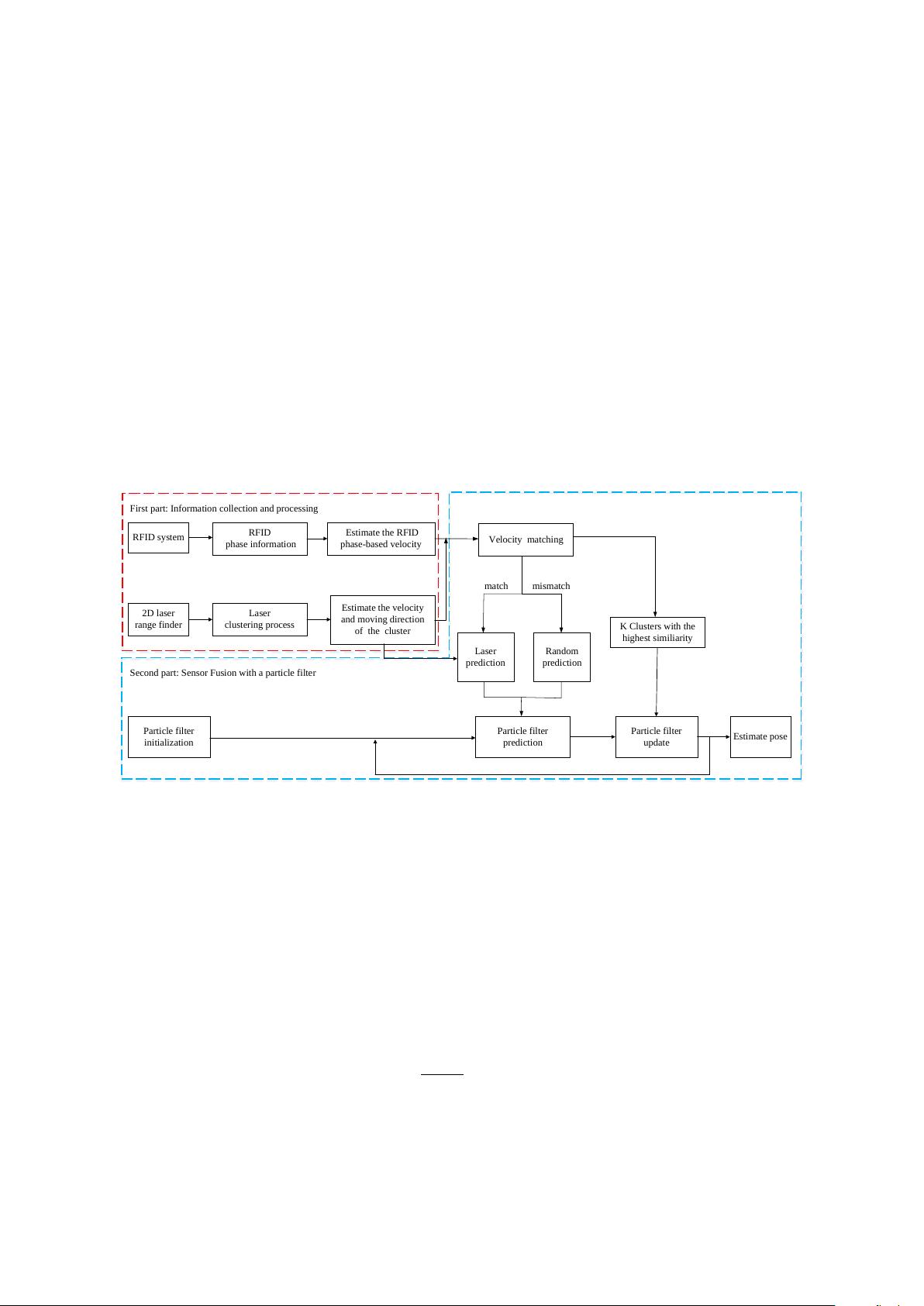
with a 2D laser range finder carried by the robot and segment the ranging data into clusters. After that,
we find the neighboring clusters (two neighbors) in the continuous time and treat the two clusters
as the same obstacle, which is used to estimate the distance-based velocity. This part of information
acquisition and data processing is used for subsequent velocity matching and the particle filtering.
In the other part, we first calculate the similarity between phase-based velocity and the
distance-based velocity and then determine the velocity matching according to a defined similarity
rule. In addition, we choose the best K clusters with the best velocity similarity score to facilitate the
processing of the particle filtering. To improve localization accuracy and robustness of the system,
we use different prediction methods for the particle filter based on the velocity matching results:
(1) If the
velocity matching is successful, we can find the effective laser cluster for prediction, which is
referred to as laser prediction in this paper. (2) If the velocity matching is unsuccessful, we choose
another method called the random prediction method. After that, we update the particle’s weight in the
particle filter using the best K clusters. Finally, we localize the moving object by iteratively performing
prediction, update, and resampling of the particle filter. The role of this part is to improve the
positioning efficiency and accuracy by complementing the RFID phase with laser ranging information
using a particle filter.
RFID system
Estimate the RFID
phase-based velocity
2D laser
range finder
Laser
clustering process
RFID
phase information
Estimate the velocity
and moving direction
of the cluster
Velocity matching
K Clusters with the
highest similiarity
Particle filter
update
Estimate pose
Particle filter
initialization
Particle filter
prediction
Random
prediction
Laser
prediction
match mismatch
First part: Information collection and processing
Second part: Sensor Fusion with a particle filter
Figure 1. System overview.
3. Moving Object Localization Based on the Particle Filtering
We describe the details of the system in this section. In particular, the computation of RFID phase
velocity is described in Section 3.1, the clustering of laser ranging data is presented in Section 3.2,
the estimation of the velocity and moving direction of a cluster is detailed in Section 3.3, and
velocity matching and the implementation using a particle filter are detailed in Sections 3.4 and 3.5,
respectively. The mathematical symbols and their meanings used in this paper are listed in Table 1.
3.1. Computing RFID Phase-Based Velocity
The phase obtained by RFID is a periodical function, which can be described as:
ϕ
t
=
2π · d
t
λ
· mod(2π), (1)
where
ϕ
t
is the signal phase at time
t
,
λ
is the wavelength of the receiving signal, and
d
t
is the distance
from RFID tag to the antenna. In practice, signal phase is influenced by the transmitter, receiver,
and tag’s
reflection characteristics [
30
], which introduce additional phase rotation. Therefore, the
phase of RFID signal could be modeled as:
剩余17页未读,继续阅读
2011-03-17 上传
2023-11-27 上传
2023-12-17 上传
2023-05-18 上传
2023-05-24 上传
2023-05-24 上传
2023-07-28 上传
2023-11-27 上传
2023-06-11 上传

weixin_38564826
- 粉丝: 5
- 资源: 910
 我的内容管理
展开
我的内容管理
展开







最新资源
- 解决Eclipse配置与导入Java工程常见问题
- 真空发生器:工作原理与抽吸性能分析
- 爱立信RBS6201开站流程详解
- 电脑开机声音解析:故障诊断指南
- JAVA实现贪吃蛇游戏
- 模糊神经网络实现与自学习能力探索
- PID型模糊神经网络控制器设计与学习算法
- 模糊神经网络在自适应PID控制器中的应用
- C++实现的学生成绩管理系统设计
- 802.1D STP 实现与优化:二层交换机中的生成树协议
- 解决Windows无法完成SD卡格式化的九种方法
- 软件测试方法:Beta与Alpha测试详解
- 软件测试周期详解:从需求分析到维护测试
- CMMI模型详解:软件企业能力提升的关键
- 移动Web开发框架选择:jQueryMobile、jQTouch、SenchaTouch对比
- Java程序设计试题与复习指南
