三菱运动控制器SV22虚模式安全操作与编程指南
需积分: 20 105 浏览量
更新于2024-07-18
收藏 4.52MB PDF 举报
"运动控制器使用手册(虚模式)——三菱运动控制器SV22虚模式编程"
本手册详细介绍了如何在虚模式下使用三菱运动控制器SV22进行定位控制。定位控制是工业自动化中的关键技术,它涉及到精准移动和停止机械设备,如机器人手臂、精密装配设备等。虚模式是一种软件模拟方式,允许用户在不实际运行硬件的情况下测试和配置控制器参数。
在使用运动控制器之前,必须先了解并遵守安全注意事项,这是确保人员安全和设备完好无损的关键。手册中特别强调了"危险"和"注意"两个等级的安全提示,两者都非常重要,忽视可能导致严重后果,包括人身伤害和财产损失。
防止触电是首要的安全措施。在操作过程中,任何时候都不能打开控制器的安全罩和端子台外罩,以免接触到高电压部分导致触电。在进行配线作业和定期检查时,应先切断电源,并等待足够时间让内部电荷消散。所有设备必须正确接地,以减少触电风险,并且只允许专业技术人员进行配线和检查工作。避免在湿润环境下操作,保护好电缆,防止短路和过载。
防止火灾同样重要。控制器、伺服放大器和伺服电机应安装在非易燃材料上,以防火花引起火灾。在发生故障时,应及时切断电源,尤其是在使用再生电阻时,要设置异常信号来中断电源,防止过大的再生电流导致火灾。
手册还涵盖了定位控制参数的设置、定位专用软元件的使用和定位方法。定位控制参数包括速度、加速度、目标位置等,这些参数的正确设定直接影响到运动的精度和稳定性。定位专用软元件是专为定位控制设计的功能单元,可能包括定位指令、位置比较、位置到达检测等,它们使得编程更加便捷。定位方法则涉及脉冲控制、绝对位置控制等多种方式,根据具体应用选择合适的方法。
此外,手册还会详细介绍如何初始化和调试控制器,以及如何处理和预防潜在的故障。学习并理解这份手册的内容,对于有效地操作和维护三菱运动控制器SV22至关重要,特别是对于那些在虚模式下进行开发和测试的工程师来说。
A -15
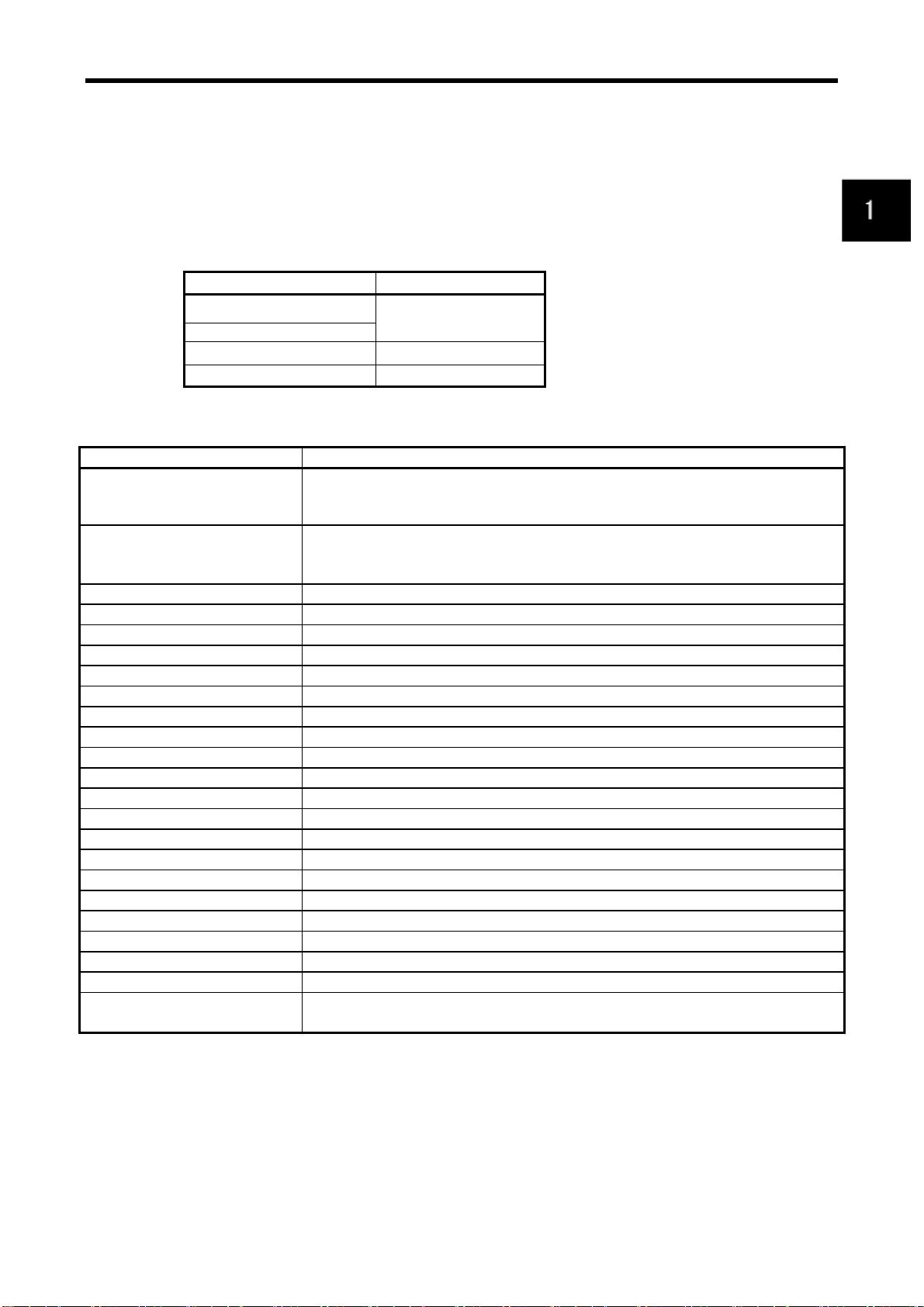
(2) PLC
手册名称
手册编号
(型号代码)
QCPU 用户手册(硬件设计・维护检查篇)
对CPU模块、电源模块、基板模块、扩展电缆、存储卡等硬件的规格以及系统
维护检查、故障排查、错误代码等进行说明。
SH-080472
(13JP56)
QnUCPU 用户手册(功能解说・程序基础篇)
对编程所需的功能、编程方法以及元件等进行说明。
SH-080802
(13JY94)
QCPU 用户手册(多CPU系统篇)
对多CPU系统的概要、系统构成、输入输出编号、CPU模块间的通信、输入
输出模块/智能功能模块间的通信进行说明
SH-080475
(13JP59)
QnUCPU 用户手册(内置Ethernet端口通信篇)
对CPU内置Ethernet端口通信功能进行说明。
SH-080806
(13JY96)
MELSEC-Q/L 编程手册(共通指令篇)
对顺序指令、基本指令以及应用指令等的使用方法进行说明。
SH-080804
(13JC22)
MELSEC-Q/L/Qn A编程手册(PID控制指令篇)
对进行PID控制的专用指令进行说明。
SH-080022
(13JC01)
MELSEC-Q/L/Qn A编程手册(SFC篇)
对MELSAP3的系统构成、性能规格、功能、编程、调试以及错误代码等进行
说明。
SH-080023
(13JC02)
输入输出模块用户手册
对Q PLC CPU输入输出模块、连接器、连接器/端子台变换模块等的规格进行
说明。
SH-080024
(13JQ45)
剩余322页未读,继续阅读
485 浏览量
146 浏览量
208 浏览量
103 浏览量
124 浏览量
108 浏览量
106 浏览量

jiahuiamm
- 粉丝: 0
- 资源: 3
 我的内容管理
展开
我的内容管理
展开







