泰科IDM640伺服驱动器硬件安装与运动控制指南
需积分: 10 68 浏览量
更新于2024-09-05
收藏 819KB PDF 举报
"泰科智能伺服驱动器-IDM640硬件安装指导手册V1.0.pdf"
这篇文档详细介绍了泰科智能伺服驱动器IDM640的硬件安装和使用方法,适用于正弦波或方波无刷电机、直流有刷电机、直线电机以及2/3相步进电机。IDM640是一款全数字DSP伺服驱动器,内置智能运动控制器,采用艺术化设计,具有广泛的兼容性和灵活性。
驱动器的主要特性包括:
1. 支持多种类型的电机控制,不受特定厂家限制。
2. 集成了RS232/485/CAN/CANopen通信协议,能够构建大规模的256轴网络运动控制系统。
3. 提供±10V模拟或数字参考量输入控制,支持编码器A、B或脉冲+方向信号。
4. 具有可编程的高频率PWM(10-bit, 20KHz)、电流环刷新率(10KHz)和PIDF控制环刷新率(2KHz)。
5. 可选择不同的反馈机制,如霍尔传感器+增量编码器、仅增量编码器或SSI绝对编码器。
6. 采用全贴片工艺,体积小巧(136×95×26mm),成本低,易操作。
7. RS232/485接口波特率高达115K,CAN/CANopen接口可达1Mbits。
8. 提供基于Windows的设置软件EasySetup/EasyMotion Studio,便于参数设定、调整和分析。
9. 支持单轴独立运行或作为从轴在网络中运行,具备分布式智能网络控制功能。
10. 提供位置、速度、转矩等多种控制模式,可以在线调整控制参数和运动模式。
11. 实现T、S型曲线、一阶或三阶PT/PVT插补、电子齿轮和凸轮等功能。
12. 包含可编程的TML指令,用于运动控制、I/O处理、数学逻辑运算及远程控制。
13. 提供TML_LIB for PC和TML_LIB for PLC运动控制函数库,分别适用于Windows/Linux环境和Siemens SIMATIC S7-300、OMRON CJ1系列PLC的快速开发。
14. 设有多个可编程数字输入和高速数字差分输入,如使能、复位、限位、原点等信号输入。
该手册详细阐述了IDM640的硬件连接、参数配置、故障诊断和安全注意事项,对于用户正确安装和高效使用该伺服驱动器提供了全面的指导。
IDM640–8EIA CAN/CANopen 智能伺服驱动器硬件安装手册 V1.0 适用于正弦波或方波无刷、直流有刷、直线、2/3 相步进电机
3 电话:0755-26712201 传真:0755-26712958
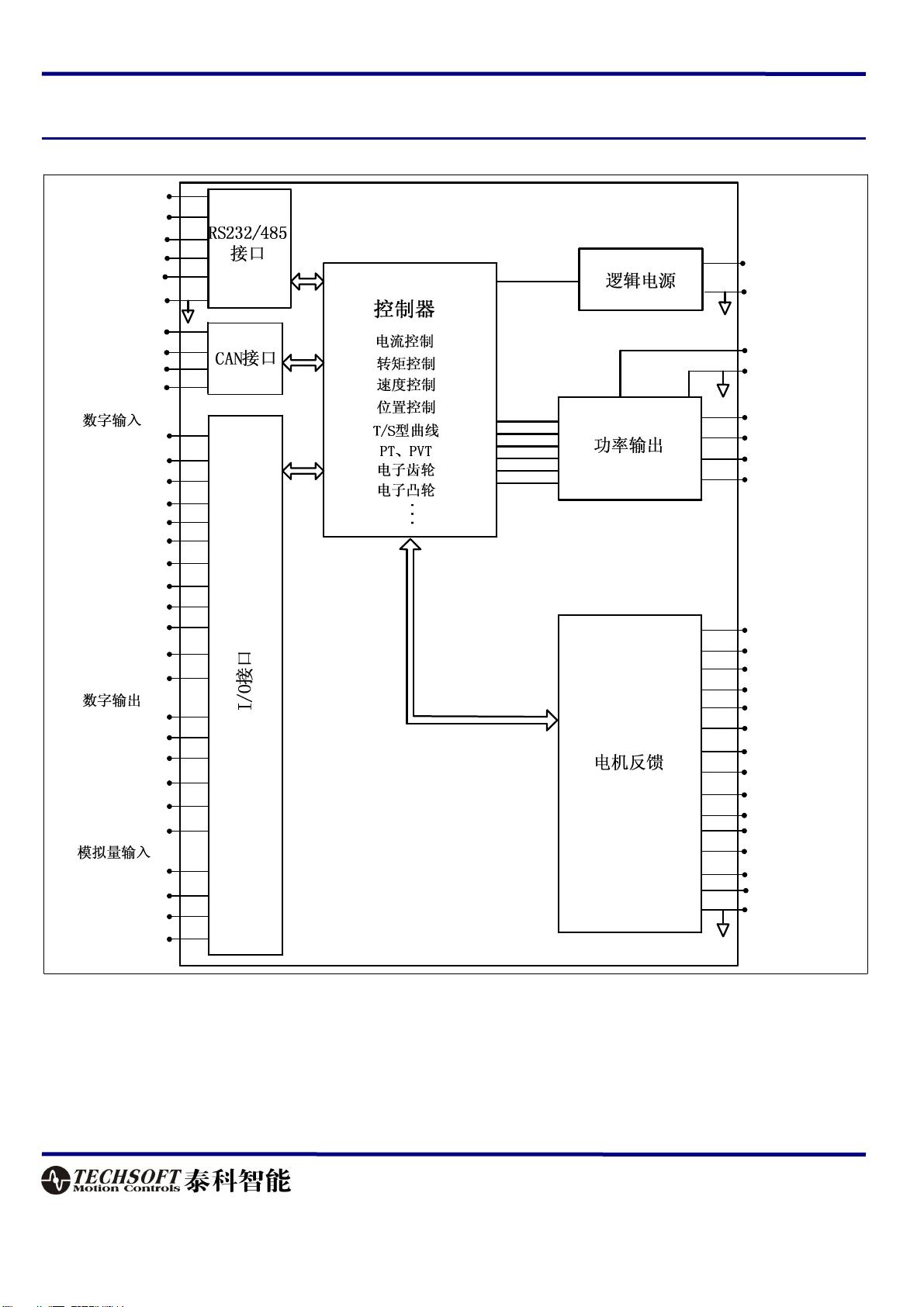
功能
功能功能
功能块
块块
块图
图图
图
-Ref
+Ref
-Tach
OUT#12/ER
OUT#25/RD
OUT#28
OUT#29
OUT#30
OUT#31
+Tach
RESET
IN#36
IN#39
IN#2/LSP
IN#24LSN
B2/DIR-
A2/PU-
IN#37/B2/DIR+
IN#38/A2/PU+
IN#16/EN
24VPLC
0VPLC
TXD
RXD
+5V
GND
485A+
485B-
CAN_H
CAN_V+
CAN_GND
CAN_L
MOTOR A/A+
MOTOR B/A-
MOTOR C/B+
MOTOR BR/B-
+VMOT
+VLOG
GND
MOT ENC A1+
MOT ENC A1-
MOT ENC B1+
MOT ENC B1-
MOT ENC Z1+
MOT ENC Z1-
H1/B2/DT+
H2/Z2+
H2/Z2-
H3/A2/CK+
H3/A2/CK-
MOT Therm
+5VDC
GND
H1/B2/DT-
GND
剩余12页未读,继续阅读
2019-10-15 上传
2019-09-20 上传
点击了解资源详情
2019-10-13 上传
2019-10-14 上传
2019-10-22 上传
2023-12-22 上传

weixin_38744270
- 粉丝: 328
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- Fisher Iris Setosa数据的主成分分析及可视化- Matlab实现
- 深入理解JavaScript类与面向对象编程
- Argspect-0.0.1版本Python包发布与使用说明
- OpenNetAdmin v09.07.15 PHP项目源码下载
- 掌握Node.js: 构建高性能Web服务器与应用程序
- Matlab矢量绘图工具:polarG函数使用详解
- 实现Vue.js中PDF文件的签名显示功能
- 开源项目PSPSolver:资源约束调度问题求解器库
- 探索vwru系统:大众的虚拟现实招聘平台
- 深入理解cJSON:案例与源文件解析
- 多边形扩展算法在MATLAB中的应用与实现
- 用React类组件创建迷你待办事项列表指南
- Python库setuptools-58.5.3助力高效开发
- fmfiles工具:在MATLAB中查找丢失文件并列出错误
- 老枪二级域名系统PHP源码简易版发布
- 探索DOSGUI开源库:C/C++图形界面开发新篇章
