KITTI数据集:自动驾驶视觉算法评测的金标准
需积分: 28 139 浏览量
更新于2024-07-18
收藏 10.57MB PPTX 举报
"本次调研将深入探讨著名的KITTI数据集,该数据集是自动驾驶和计算机视觉研究的关键资源,由德国卡尔斯鲁厄理工学院和丰田美国技术研究院共同创建。"
在计算机视觉和自动驾驶领域,数据集起着至关重要的作用,它们为算法训练和评估提供了丰富的素材。而作为这个领域的标志性数据集,KITTI(Karlsruhe Institute of Technology and Toyota Technological Institute)数据集具有广泛的应用和影响力。自发布以来,它已经推动了多个关键任务的进步,包括立体图像处理、光流估计、视觉里程计、3D物体检测和跟踪。
1. KITTI数据集概述
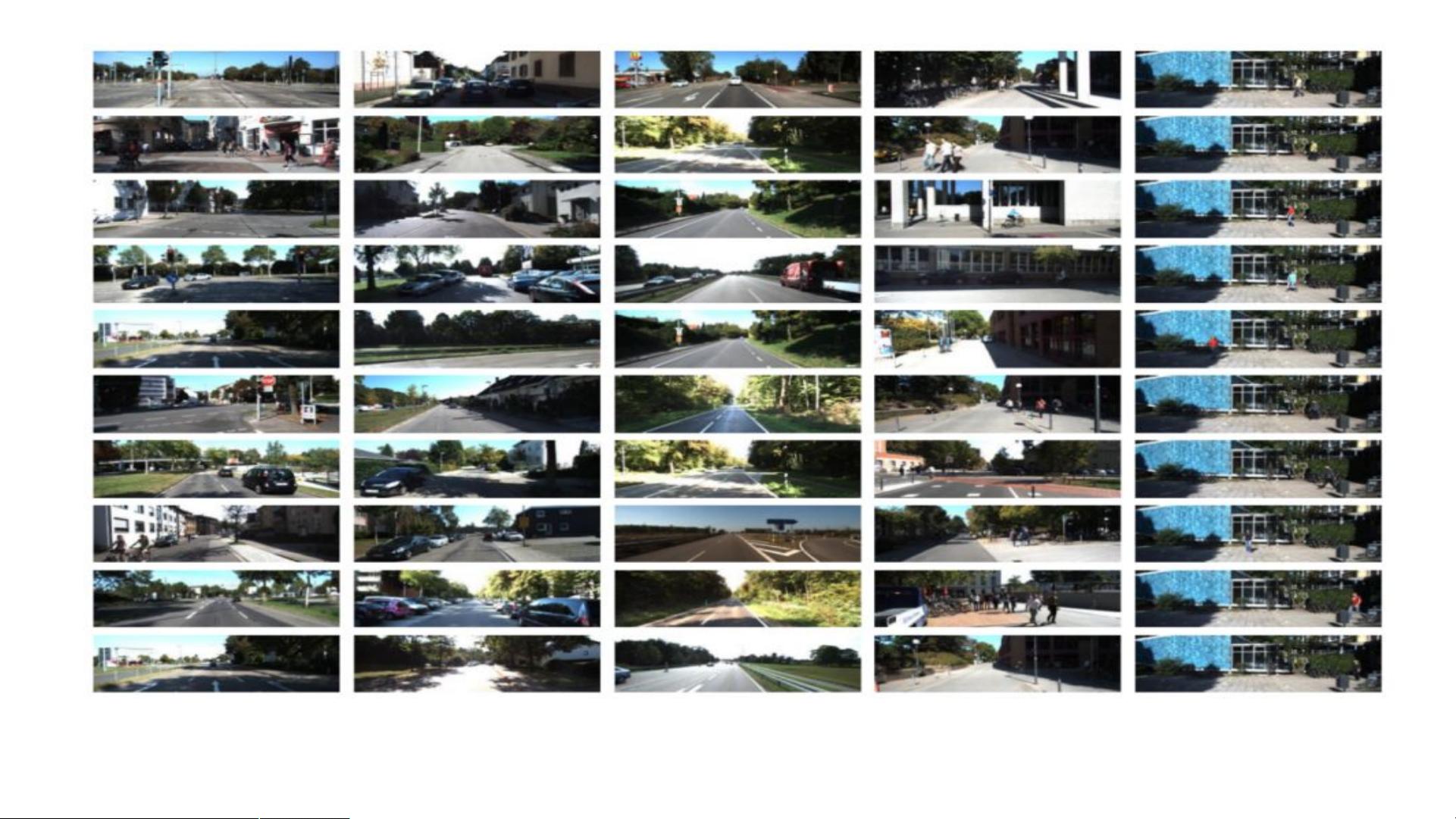
KITTI数据集旨在提供一个全面的平台,以衡量不同计算机视觉技术在实际道路环境中的表现。它涵盖了各种复杂的驾驶场景,如城市街道、乡村小道和高速公路,确保了算法在多种条件下的适用性。数据集中包含了15辆汽车和30个行人的最大数量,同时考虑了遮挡和截断的情况,以测试算法的鲁棒性。数据以10Hz的频率进行采样和同步,确保了时间上的连续性和一致性。
2. 数据采集平台
KITTI数据集的采集设备非常先进且多样化,包括了两台灰度摄像机、两台彩色摄像机、一个64线的Velodyne激光雷达、四个光学镜头以及一个GPS导航系统。这种配置能够捕获高分辨率的图像、深度信息和精确的地理位置数据。其中,Velodyne激光雷达提供了3D扫描能力,能以10Hz的速率收集大量点云数据,覆盖广大的水平和垂直视场。OXTS RT3003导航系统则提供了精确的惯性和GPS定位,保证了传感器数据的空间对应。
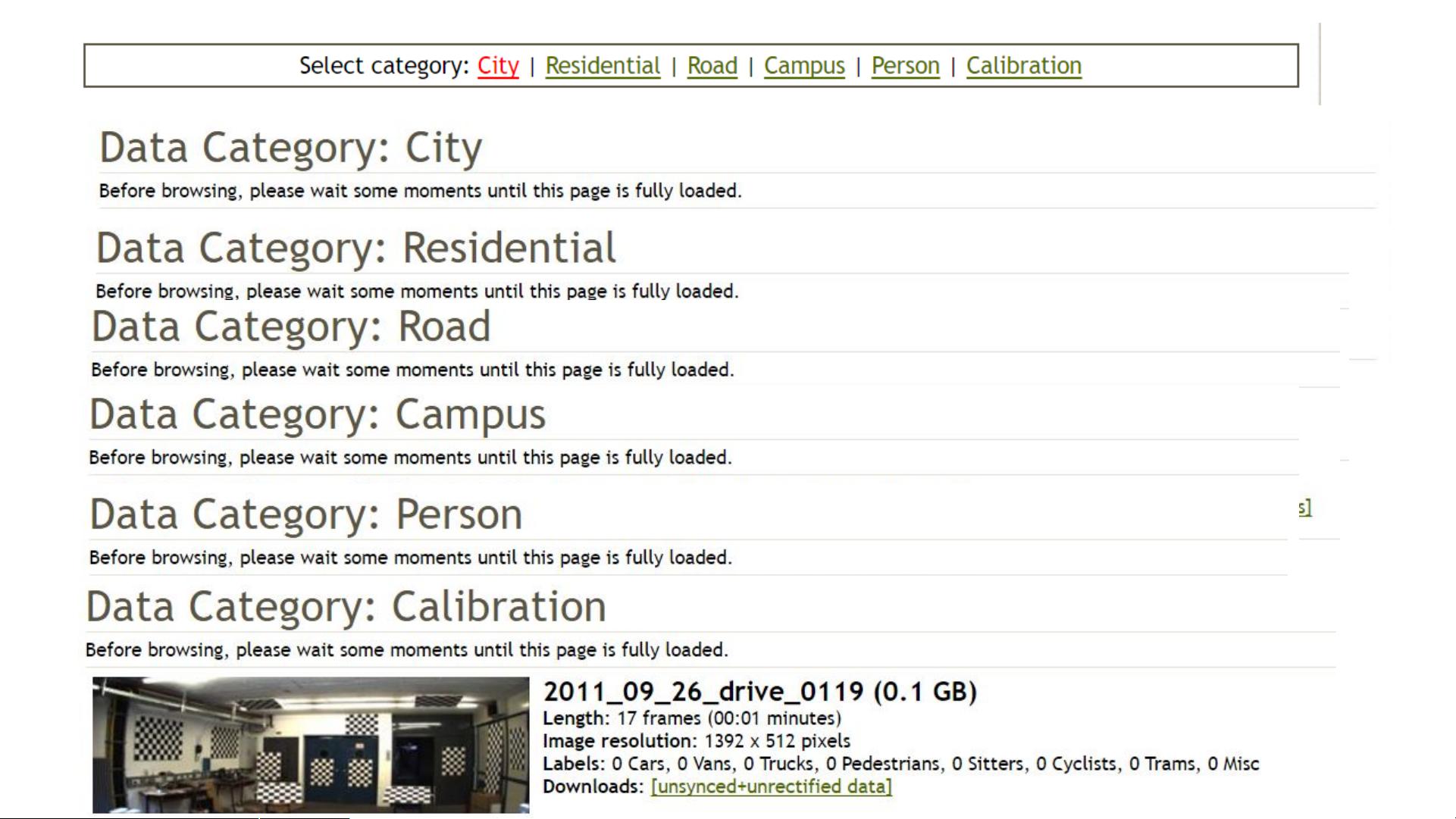
3. 数据集内容
KITTI数据集主要包含以下部分:
- 立体图像对:用于评估立体匹配和深度估计算法。
- 光流数据:用于测试光流估计算法,理解图像中像素运动。
- 视觉里程计序列:用于估计相机的运动轨迹,检验SLAM(Simultaneous Localization And Mapping)算法。
- 3D物体检测和跟踪:提供详细的3D边界框标注,用于训练和评估物体检测和跟踪算法。
4. 应用与评估
KITTI数据集不仅支持算法开发,还提供了一套标准的评估工具,使得研究人员可以公平地比较不同方法的性能。例如,对于3D物体检测,数据集提供了8个不同的类别标签,包括汽车、货车、卡车、行人、坐着的行人、骑自行车的人、电车和其它。
KITTI数据集是一个综合性的资源,对推进自动驾驶技术的发展起到了关键作用。它通过提供大量现实世界的数据,促进了计算机视觉算法的创新和优化,使得车辆能够在复杂环境中实现更安全、更智能的行驶。无论是学术研究还是工业应用,对KITTI数据集的深入理解和有效利用都是至关重要的。

传感器,数据格式和校准的详细信息:
•
I// 数据表
•
原始数据开发工具包
•
原始数据集下载脚本
•
AA 为点云和追踪程序序列编写了基于 J 的可视化程序。
•
K 汇集了一些使用 27 处理 原始数据的工具
•
-$" 编写了一个用于读取对象标签 CA7 文件的
% 解析器
剩余63页未读,继续阅读
2017-11-22 上传
2020-05-09 上传
2023-10-09 上传
2023-07-27 上传
2023-07-31 上传
2023-04-05 上传
2023-04-08 上传
2023-11-03 上传

女王の专属领地
- 粉丝: 4180
- 资源: 49
 我的内容管理
展开
我的内容管理
展开







最新资源
- Android圆角进度条控件的设计与应用
- mui框架实现带侧边栏的响应式布局
- Android仿知乎横线直线进度条实现教程
- SSM选课系统实现:Spring+SpringMVC+MyBatis源码剖析
- 使用JavaScript开发的流星待办事项应用
- Google Code Jam 2015竞赛回顾与Java编程实践
- Angular 2与NW.js集成:通过Webpack和Gulp构建环境详解
- OneDayTripPlanner:数字化城市旅游活动规划助手
- TinySTM 轻量级原子操作库的详细介绍与安装指南
- 模拟PHP序列化:JavaScript实现序列化与反序列化技术
- ***进销存系统全面功能介绍与开发指南
- 掌握Clojure命名空间的正确重新加载技巧
- 免费获取VMD模态分解Matlab源代码与案例数据
- BuglyEasyToUnity最新更新优化:简化Unity开发者接入流程
- Android学生俱乐部项目任务2解析与实践
- 掌握Elixir语言构建高效分布式网络爬虫
