PointNet到PointNet++深入解析:3D计算机视觉与Pytorch实现
版权申诉
45 浏览量
更新于2024-07-04
收藏 1.75MB PDF 举报
"该资源是一份关于3D计算机视觉的PDF文档,主要讲解了从PointNet到PointNet++的理论及PyTorch实现,适用于理解3D点云处理在计算机视觉中的应用。"
3D计算机视觉是现代技术中的一个重要领域,尤其是在自动驾驶、机器人导航和虚拟现实等场景中。PointNet和PointNet++是处理3D点云数据的代表性深度学习模型,它们在理解和分析3D环境方面发挥了关键作用。
1. 点云基础
点云是由N个D维的点构成的数据结构,通常在3D空间中,D=3,代表(x, y, z)坐标。点云可以包含附加信息,如法向量、强度等特征。相比其他表示方式(如Mesh、体素或多角度RGB图像),点云更直接地反映了传感器(如雷达)获取的原始数据,且数据表示简洁,一个物体可以用一个简单的矩阵表示。
2. 点云的优势
点云因其原始性和简单性而被广泛采用。它们更接近实际设备的探测结果,且处理点云的方式更为直观。此外,点云可以捕捉物体表面的细节,对于自动驾驶等应用来说,这种特性尤为重要。
3. 点云处理的早期工作
在PointNet之前,点云的深度学习处理主要包括基于3DCNN的体素模型、点云映射到2D空间的CNN方法以及传统的手工特征分类。体素模型受限于计算量,往往只能处理小规模的体素网格,导致表面特征丢失。2D映射方法则损失了3D信息。手工特征分类虽然能提取一些局部特性,但缺乏泛化能力。
4. PointNet
PointNet是首个直接处理点云的深度学习模型,它克服了之前方法的局限,能够对每个点进行操作并捕捉全局上下文信息。PointNet的网络架构包含对单个点的特征提取和全局特征的聚合两部分,使得模型能够同时理解和处理点云的局部和整体信息。
5. PointNet++
PointNet++是在PointNet基础上的扩展,旨在更好地捕捉点云的局部结构。通过分层采样和聚类,PointNet++能够对不同尺度的邻域进行迭代学习,从而增强模型对复杂几何结构的理解和识别能力。
6. PyTorch实现
提供的PDF文档包含了PointNet和PointNet++的PyTorch代码实现,这对于研究人员和开发者来说是一份宝贵的资源,可以帮助他们理解和实践这些先进的3D深度学习模型。
这份文档深入探讨了3D点云处理的关键技术和算法,对想在计算机视觉领域,特别是3D深度学习方向进行研究或应用的人来说,是一份极具价值的学习材料。
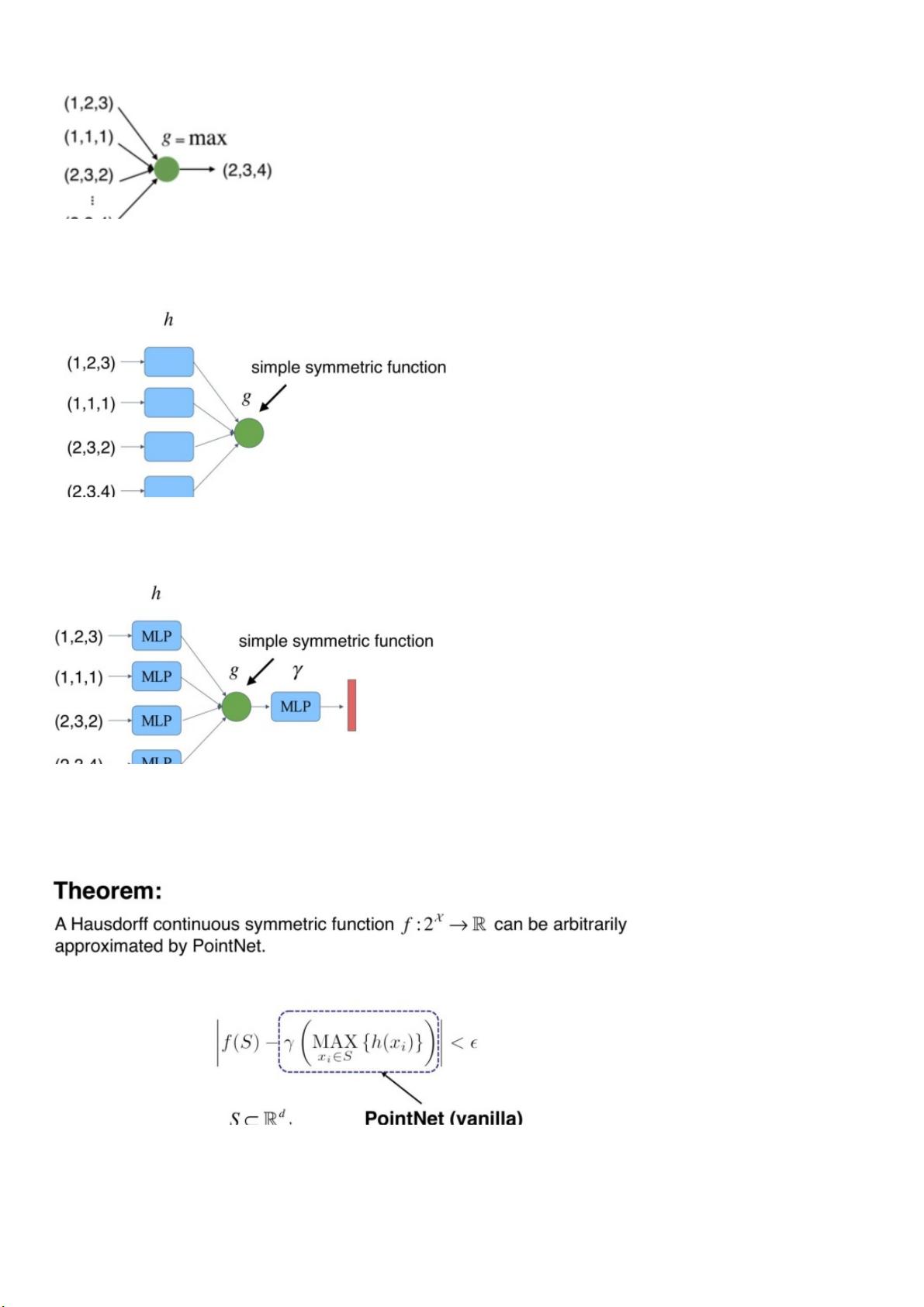
因此我们可以利⽤max函数设计⼀个很简单的点云⽹络,如下:
但是这样的⽹络有⼀个问题,就是每个点损失的特征太多了,输出的全局特征仅仅继承了三个坐标轴上最⼤的那个特征,因此我们不妨先将
点云上的每⼀个点映射到⼀个⾼维的空间(例如1024维),⽬的是使得再次做MAX操作,损失的信息不会那么多。
此时我们发现,当我们将点云的每个点先映射到⼀个冗余的⾼维空间后,再去进⾏max的对称函数操作,损失的特征就没那么多了。由此,
就可以设计出这PointNet的雏形,称之为PointNet(vanilla):
2.1.2 理论证明
论⽂中其实有给出理论的证明,⼤致的意思是:任意⼀个在Hausdorff空间上连续的函数,都可以被这样的PointNet(vanilla)⽆限的逼近。
2.2 基于点云的旋转不变性
剩余17页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2021-06-22 上传
2024-03-29 上传
2023-06-29 上传
2024-09-06 上传
2019-09-17 上传
2021-05-14 上传

_webkit
- 粉丝: 31
- 资源: 1万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- CRUD-JS
- 这是一个简单弹出视图
- PruebaV-V_Verde:佛得角
- Extract data from an existing .fig file:Extract data from an existing matlab 2D or 3D figure-matlab开发
- 行业分类-设备装置-接触网整体吊弦恒张力预制平台.zip
- LiveSplit.GBA:BizHawk中GBA模拟器的通用自动拆分器
- 设计:Tidyverse设计原则
- analyze_mcmc.rar_Windows编程_FlashMX_
- matlab转换java代码-POSTaggerSML:Stanford-MATLAB词性标注器:MATLAB所采用的StanfordLog-
- p2pshaper-开源
- 参考资料-27建筑施工企成本管理办法.zip
- krautadmin:KrautAdmin-基于服务器的兄弟情谊应用程序
- 在应用添加AdMob广告案例
- myfifo.rar_VHDL/FPGA/Verilog_VHDL_
- angularJs-datatable
- SQLWeek3
