基于图像的嵌入式汽车纵向碰撞预警系统设计
59 浏览量
更新于2024-08-28
收藏 408KB PDF 举报
"嵌入式汽车纵向碰撞预警系统研究"
汽车纵向碰撞预警系统是现代智能交通技术中的重要组成部分,旨在通过实时监测车辆与前方障碍物之间的距离,预防潜在的碰撞风险,从而提高道路行车安全。传统的理论计算的安全车距往往与实际驾驶习惯不匹配,可能导致驾驶员对系统的信任度下降,影响其接受度。而采用基于图像传感器的预警系统可以更直观地测量车距,并能适应驾驶员的实际需求。
本研究提出了一种基于嵌入式系统的汽车纵向碰撞预警模型。嵌入式系统因其小巧的体积、高效的实时处理能力和较低的成本,成为车载安全辅助驾驶系统的理想选择,能够有效克服PC机等传统处理平台的局限性。论文主要关注如何利用图像传感器来精确测量本车与前车的车距,并在此基础上构建预警模型。
在车距测量方面,图像传感器被安装在车辆前端顶部,考虑到摄像头的高度h,建立了相应的空间坐标系,包括世界坐标系和摄像机坐标系。通过分析摄像机的安装角度(扫视角β和倾斜角α),可以计算出图像中的像素坐标与实际距离的关系。单帧图像的测距方法依赖于图像处理技术,如特征检测和匹配,来确定目标物体的距离。而多帧图像的测距则结合了物体运动的连续性,通过连续帧中目标物体位置的变化来估计其动态距离。
建立预警模型的关键在于将图像传感器的数据转化为实际距离信息,并结合车辆速度、制动性能等因素,确定安全预警阈值。当车辆与前车的距离低于这个阈值时,系统会发出预警信号,提醒驾驶员采取相应措施。为解决理论计算的安全距离与实际驾驶习惯的差异,该模型可能需要进行参数调整,使得预警距离更符合驾驶员的预期,提高系统的实用性和用户接受度。
此外,嵌入式系统的设计还需要考虑到硬件平台的选择、软件算法的优化以及系统的稳定性与可靠性。例如,选用低功耗、高性能的微处理器,确保在复杂的道路环境中能够快速、准确地处理图像数据。同时,为了提升用户体验,系统界面应简洁易懂,预警提示需直观且及时。
嵌入式汽车纵向碰撞预警系统的研究涵盖了图像处理、坐标系统建立、车距测量、预警模型构建等多个方面,旨在提供一种既科学又符合驾驶习惯的安全驾驶辅助工具。这种系统对于提升道路交通安全,减少因追尾事故造成的损失具有重要的实际意义。
嵌入式汽车纵向碰撞预警系统研究嵌入式汽车纵向碰撞预警系统研究
0 引言 利用图像传感器感知前方道路交通环境与障碍物位置,实现安全车距测量,对处于碰撞危险的汽车
及时报警有利于减少交通事故,提高道路交通安全。由于理论计算的安全车距首先要以保障安全为前提,经常
与驾驶员在行驶过程中认可的安全车距有较大的出入,导致驾驶员对预警系统的不信任感,不利于系统的推广
使用。同时,作为安全辅助驾驶系统的处理平台,PC机的体积、成本及功能的冗余性是应用在车载系统中难以
克服的瓶颈。 本文以图像方式测量本车与前车的车距为基础,建立汽车纵向碰撞预警模型,解决理论计算
的安全距离与驾驶员认可的习惯距离不相一致的矛盾;考虑嵌入式系统处理的实时性与体积小巧性等特点,采
用嵌入式方法
0 引言引言
利用图像传感器感知前方道路交通环境与障碍物位置,实现安全车距测量,对处于碰撞危险的汽车及时报警有利于减少交
通事故,提高道路交通安全。由于理论计算的安全车距首先要以保障安全为前提,经常与驾驶员在行驶过程中认可的安全车距
有较大的出入,导致驾驶员对预警系统的不信任感,不利于系统的推广使用。同时,作为安全辅助驾驶系统的处理平台,PC
机的体积、成本及功能的冗余性是应用在车载系统中难以克服的瓶颈。
本文以图像方式测量本车与前车的车距为基础,建立汽车纵向碰撞预警模型,解决理论计算的安全距离与驾驶员认可的习
惯距离不相一致的矛盾;考虑嵌入式系统处理的实时性与体积小巧性等特点,采用嵌入式方法完成汽车纵向碰撞预警系统的设
计。
1 前方车距的测量前方车距的测量
图像传感器固定在车辆前端顶部,摄像头距地面高度为h。建立空间坐标系如下:
世界坐标系XYZ与摄像机坐标系xyz。动态的世界坐标系统随车辆一起运动,以摄像机镜头中心在地面的垂直投影点为原
点,地面的垂直线向上为Z轴正向,车身纵轴线方向为X轴,正向为汽车前进的反方向;摄像机坐标系统以光轴为z轴,镜头中
心为坐标原点,摄像机坐标xy平面与像平面平行;表征图像内部各点位置的像平面坐标系统的u轴、v轴与x轴、y轴平行,原
点位于图像中心,既摄像机光轴与图像的交点。所有坐标系满足右手规则。
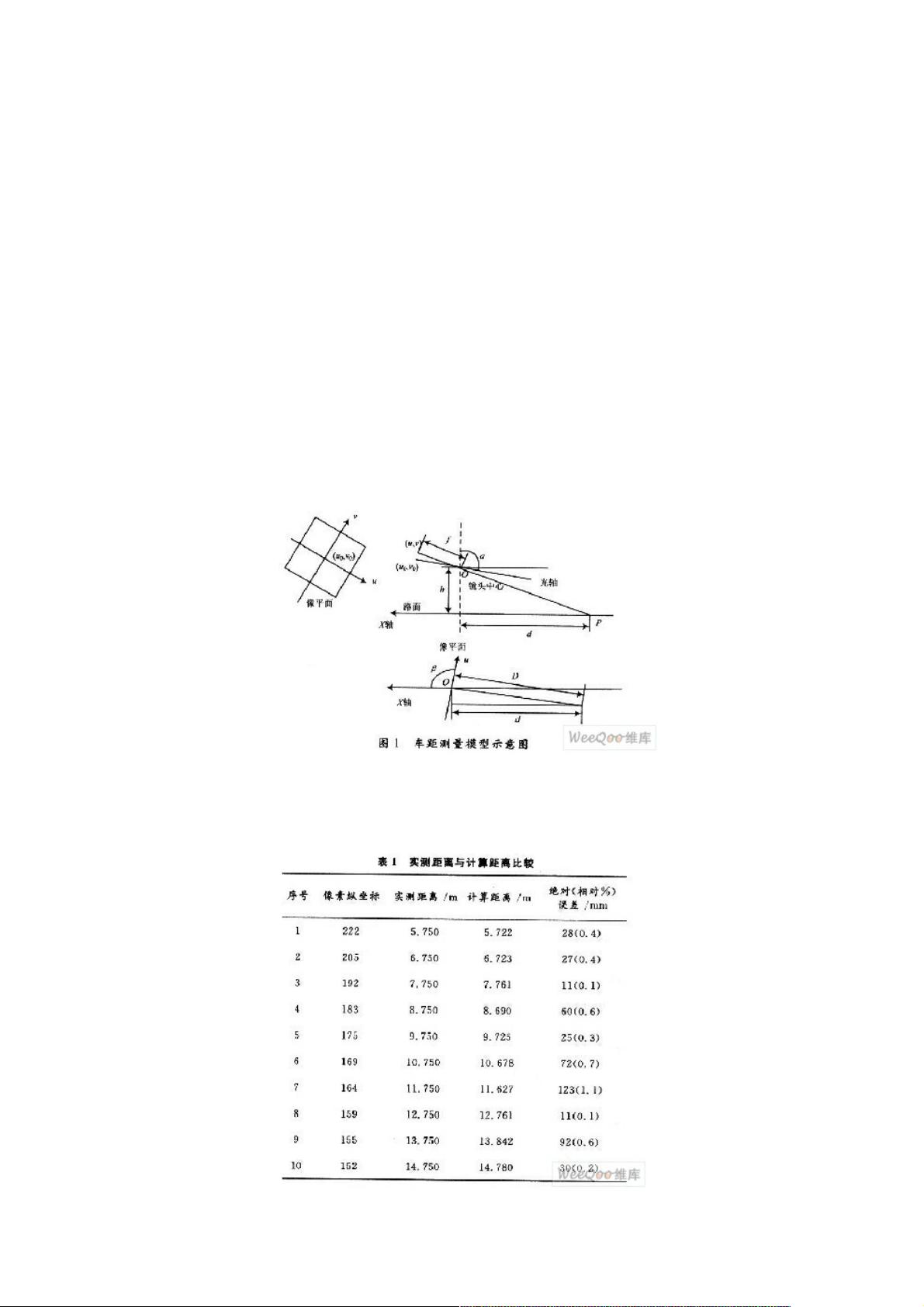
通过图像传感器对前方车辆或障碍物的测量包括利用单帧图像的测距和利用多帧图像的测距。研究中考虑摄像机的安装位
置参数,摄像机z坐标轴相对于X轴的夹角称为扫视角β,摄像机光轴(z轴)相对于垂直方向(Z轴)的夹角称为倾斜角α,如图1所
示。图中,摄像机外参数α,β,h和内参数摄像机焦距f由严格的摄像机标定获得,利用车辆的图像特征和Kalmam滤波原理实
下载后可阅读完整内容,剩余3页未读,立即下载
2020-05-23 上传
2020-08-07 上传
2023-12-12 上传
2023-06-09 上传
2023-06-10 上传
2023-11-22 上传
2023-05-21 上传
2023-06-10 上传
2023-06-05 上传

weixin_38645669
- 粉丝: 9
- 资源: 960
 我的内容管理
展开
我的内容管理
展开







最新资源
- C++多态实现机制详解:虚函数与早期绑定
- Java多线程与异常处理详解
- 校园导游系统:无向图实现最短路径探索
- SQL2005彻底删除指南:避免重装失败
- GTD时间管理法:提升效率与组织生活的关键
- Python进制转换全攻略:从10进制到16进制
- 商丘物流业区位优势探究:发展战略与机遇
- C语言实训:简单计算器程序设计
- Oracle SQL命令大全:用户管理、权限操作与查询
- Struts2配置详解与示例
- C#编程规范与最佳实践
- C语言面试常见问题解析
- 超声波测距技术详解:电路与程序设计
- 反激开关电源设计:UC3844与TL431优化稳压
- Cisco路由器配置全攻略
- SQLServer 2005 CTE递归教程:创建员工层级结构
