RB-4人形机器人技术详解:从机械到电子系统
下载需积分: 10 | PDF格式 | 1.44MB |
更新于2024-07-30
| 64 浏览量 | 举报
"RB-4机器人系统说明书"
RB-4机器人是由北京汉库机器人技术有限公司研发的一款大型双足人形机器人,其系统说明书详尽地涵盖了机械、电子和软件等多个方面。这款机器人以其复杂的机械结构和精密的电子系统设计,展示了在机器人领域的先进技术。
一、机器人机械系统
RB-4机器人具有一个头部、一个躯干、两条手臂和两条腿,由上百个精密连接件组装而成,而无胶水粘接。机械系统的设计重点在于伺服舵机的布局,以确保稳定性和灵活性。RB-4使用"U形件"和"十字件"来固定舵机,增强结构的强度,并减轻整体重量。特别地,它的膝盖、踝关节和跨部关节设计允许大范围的活动,适合执行复杂动作。例如,膝盖关节的大转动角度有利于前后滚翻,踝关节虽转动角度小但需谨慎调试以防止损坏舵机,而跨部关节的大活动范围则有利于劈叉等高难度动作。
二、机器人电子系统
RB-4的电子系统主要包括电路结构、电路板外形尺寸、专用串口线和舵机连接线。电路板内置24路伺服电路,采用Atmel 89C52单片机作为CPU,构成单片机控制系统。机器人背部的计算机控制系统是整个系统的总控器,而每个舵机内部也有独立的控制单元。此外,舵机连接线的处理,如舵机线转接法,确保了信号和动力的有效传输。
三、机器人软件系统
虽然未提供具体细节,但RB-4的软件系统很可能是用于控制机器人运动、协调各个舵机工作以及实现高级功能,如运动规划、感知和反馈控制。
四、汉库品牌机器人专用舵机介绍
汉库品牌的伺服舵机有五大特点,可能包括高效能、高精度、高稳定性、快速响应和强大的扭矩。这些舵机根据不同的需求,有的配备带丝舵盘以传递动力,有的则是双端支撑舵盘,不带丝,可能用于非动力传递的控制。
五、电池介绍
尽管没有详细信息,但电池部分应涉及电源类型、容量、续航时间以及充电方法,确保机器人在运行中的持续能量供应。
RB-4机器人系统是一个集机械工程、电子工程和软件工程于一体的复杂系统,通过精细设计和优化,实现了大型双足机器人的高动态性能和操控性。其设计理念和实施细节对于理解和研究机器人技术具有重要参考价值。
北京汉库机器人技术有限公司
第2页
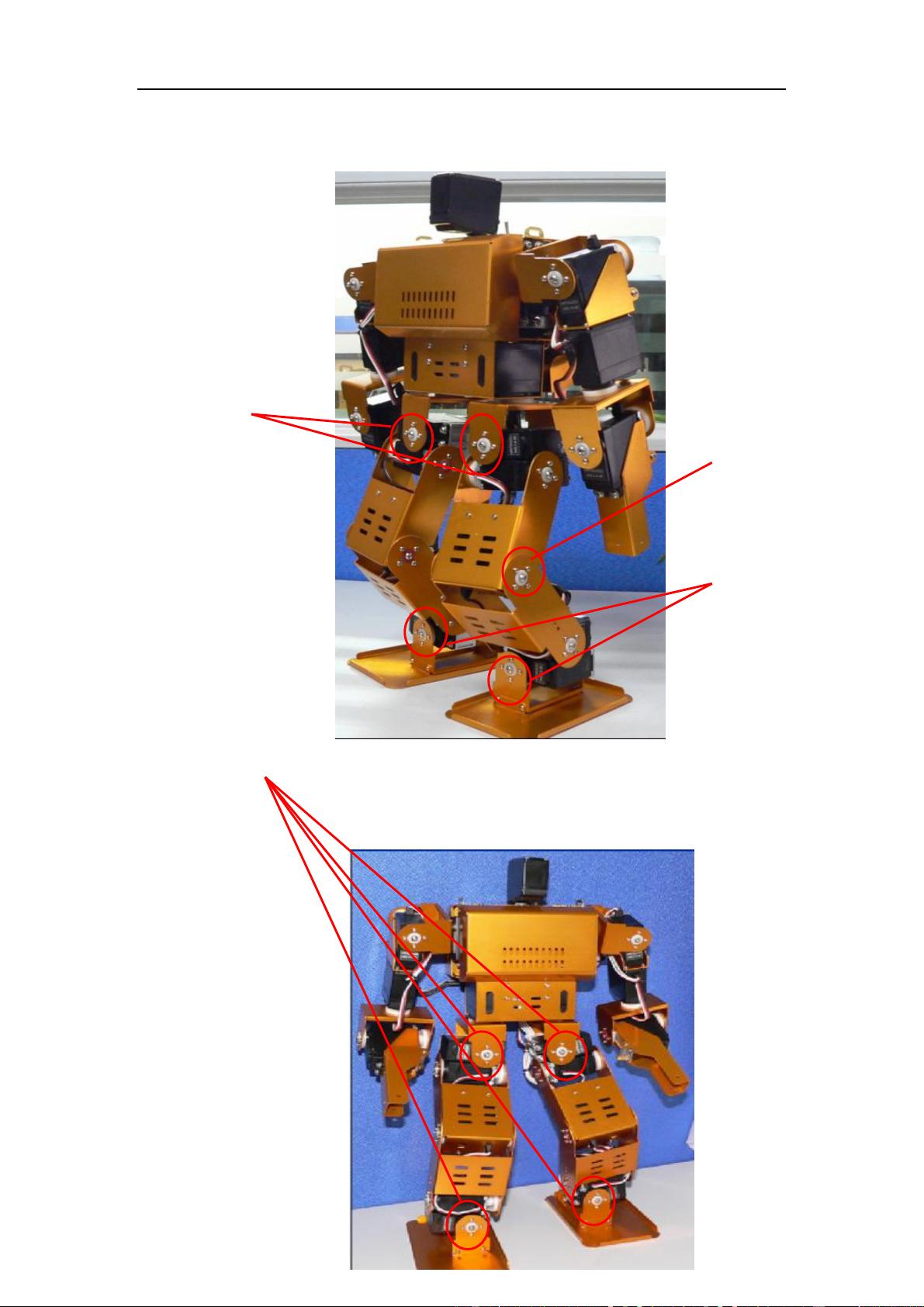
(1)前视图
膝盖关节转动
角度大,对表
现高难度动作
有利。如前、
后滚翻等。
踝关节转动角
度较小,注意
调试过程中的
舵机位置,尽
量避免烧毁舵
机的现象。
跨部关节的活
动角度很大,
对表现高难度
动作有利。如
劈叉等。
动作范例
这 4 个关
节可以构
成 4 杆机
构,完成身
体侧倾。
这些为相同型
号的带丝舵
盘。
这些舵盘都,
能传递动力。
剩余18页未读,继续阅读
相关推荐



65 浏览量

pizi145840
- 粉丝: 0
- 资源: 7
 我的内容管理
展开
我的内容管理
展开







最新资源
- 一个帮助实现条形码扫描的库-Android开发
- casile:CaSILE工具包,采用SILE和其他向导的图书出版工作流程
- TextureSwiftSupport:一个使我们获得DSL来在Texture中定义布局规范的库[如SwiftUI]
- 高端大气星级酒店展示网站静态模板.zip
- PING-开源
- 雷达成像中的时频分析成像
- WebRtcAecmSample:这是一个aecm示例(使用webrtc)
- bluetooth.rar_android 蓝牙_android bluetooth_android蓝牙_蓝牙_蓝牙通信
- area_of_a_regular_polygon
- LibraryPractice_20210327
- ruby-on-rails-cassandra:Ruby on Rails与Cassandra
- 泛型MakeGeneric方法应用实例.rar
- 影刀RPA系列公开课3:网页自动化——数据抓取.rar
- formation_control-master.zip_formation control_formation_control
- matlab标注字体代码-MATLAB-Tools:为MATLAB生成的一组脚本,这些脚本可能在您自己的项目和文件中有用
- flex-masonry:用CodeSandbox创建
