CAN总线网络拓扑自动识别技术研究
192 浏览量
更新于2024-08-31
收藏 417KB PDF 举报
"该文研究了一种自动获取CAN网络拓扑关系的方法,针对控制系统智能化需求的增长,通过在CAN总线传统架构中增加中间层并结合动态分离机制,设计了切换电路,实现快速自动识别网络拓扑,为相关技术应用提供基础。"
在现代控制系统中,随着智能化水平的不断提高,对CAN(Controller Area Network)总线网络的需求也在不断增长。CAN总线是一种高效、可靠的串行通信协议,最初应用于汽车行业,但现在已广泛应用于各种领域,包括军事和民用。它的优点在于高速通信能力(可达1 Mb/s)和在高速下的长通信距离(40 m)。CAN总线遵循ISO11898和ISO115193国际标准,分别适用于高速和低速场景。
随着信息化技术的发展,CAN总线网络在智能化应用中的角色变得越来越重要,尤其是在轨道交通等需要动态编组的场景。例如,在列车运行中,根据任务需求,CAN总线网络需要能够快速重组,这使得实时获取网络拓扑关系成为必要。传统的手动识别方法无法满足这种快速变化的需求,因此研究人员提出了一种创新方法。
该方法的核心是在CAN总线网络架构中添加一个中间层,同时利用CAN总线的网络链路动态分离机制。通过设计切换电路,能够在不影响正常通信的情况下,分离并检测网络连接状态。切换电路的工作原理是监控CAN总线上的数据流,通过特定算法解析总线上的逻辑序列,以识别各个节点之间的关系。这一过程不仅涉及到硬件电路的设计,还涉及到软件层面的数据处理流程和算法优化。
文章详细阐述了切换电路的构造及其工作原理,同时解释了整个系统如何协同工作以实现网络拓扑的快速识别。这种方法使得控制系统的使用者或设计者能迅速了解当前网络的拓扑结构,这对于网络管理和智能化应用的进一步发展至关重要。例如,它可以用于故障诊断、网络优化、安全监控等方面,大大提高了系统的灵活性和效率。
这种自动获取CAN网络拓扑关系的方法适应了智能控制系统的快速发展,为解决复杂网络环境下的动态配置问题提供了有效手段。通过深入理解这种方法,开发者和工程师可以更好地应对日益复杂的网络环境,推动CAN总线技术在更多领域的创新应用。
一种自动获取一种自动获取CAN网络拓扑关系的方法研究网络拓扑关系的方法研究
基于控制系统智能化水平日益增长的背景,快速自动识别出CAN总线网络拓扑关系的需求日益突出 ,采用在
CAN总线传统网络架构中增加中间层的措施,结合CAN总线网络链路动态分离的机制,设计了详细的切换电
路,介绍了电路的工作原理及整个系统的工作原理,明确了总线数据的处理流程、方法,实现了CAN总线网络
拓扑关系的快速自动识别,为后续相关技术的应用奠定了基础。
张向文,张帆,李向阳
(北京航天发射技术研究所,北京 100076)
摘要摘要:基于控制系统智能化水平日益增长的背景,快速自动识别出CAN总线网络拓扑关系的需求日益突出 ,采用在CAN
总线传统网络架构中增加中间层的措施,结合CAN总线网络链路动态分离的机制,设计了详细的切换电路,介绍了电路的工
作原理及整个系统的工作原理,明确了总线数据的处理流程、方法,实现了CAN总线网络拓扑关系的快速自动识别,为后续
相关技术的应用奠定了基础。
关键词 关键词:CAN总线;网络拓扑;编组;逻辑序列;动态分离
中图分类号 中图分类号:TN710文献标识码:ADOI: 10.19358/j.issn.1674-7720.2017.10.021
引用格式 引用格式:张向文,张帆,李向阳.一种自动获取CAN网络拓扑关系方法的研究[J].微型机与应用,2017,36(10):
74-76,80.
0引言引言
控制器局域网络(Controller Area Net,CAN)是Robert Bosch公司在20世纪80年代初为汽车业开发的一种串行数据通信总
线,其通信速率可达到1 Mb/s,并且通信距离在1 Mb/s下可达到40 m。CAN已有国际标准,即用于高速场合的ISO 11898和用于
低速场合的ISO 115193[12]。由于其具备可靠性和良好的性能价格比,在军民领域均已得到广泛应用。近些年随着信息化
技术的快速发展,智能化的应用如雨后春笋般不断涌现,同样基于CAN总线网络的智能化应用也在不断地发展与进步,对CAN总
线网络的相关基础技术提出的新的要求。在新的轨道交通的环节中,由于存在列车的编组需要,导致整个CAN总线网络并不
是固定的、稳定的,它是根据不同的任务需求进行临时、快速组合的[34]。因此产生了对CAN总线网络拓扑关系自动进行
快速识别的需求,以便用户、设计人员能够快速掌握当前控制系统网络的网络拓扑关系,为后续网络管理以及相关智能化应用
奠定基础。本文基于此需求,设计了一种快速CAN总线网络拓扑关系自动获取的方法。
1传统传统CAN网络的组成介绍网络的组成介绍
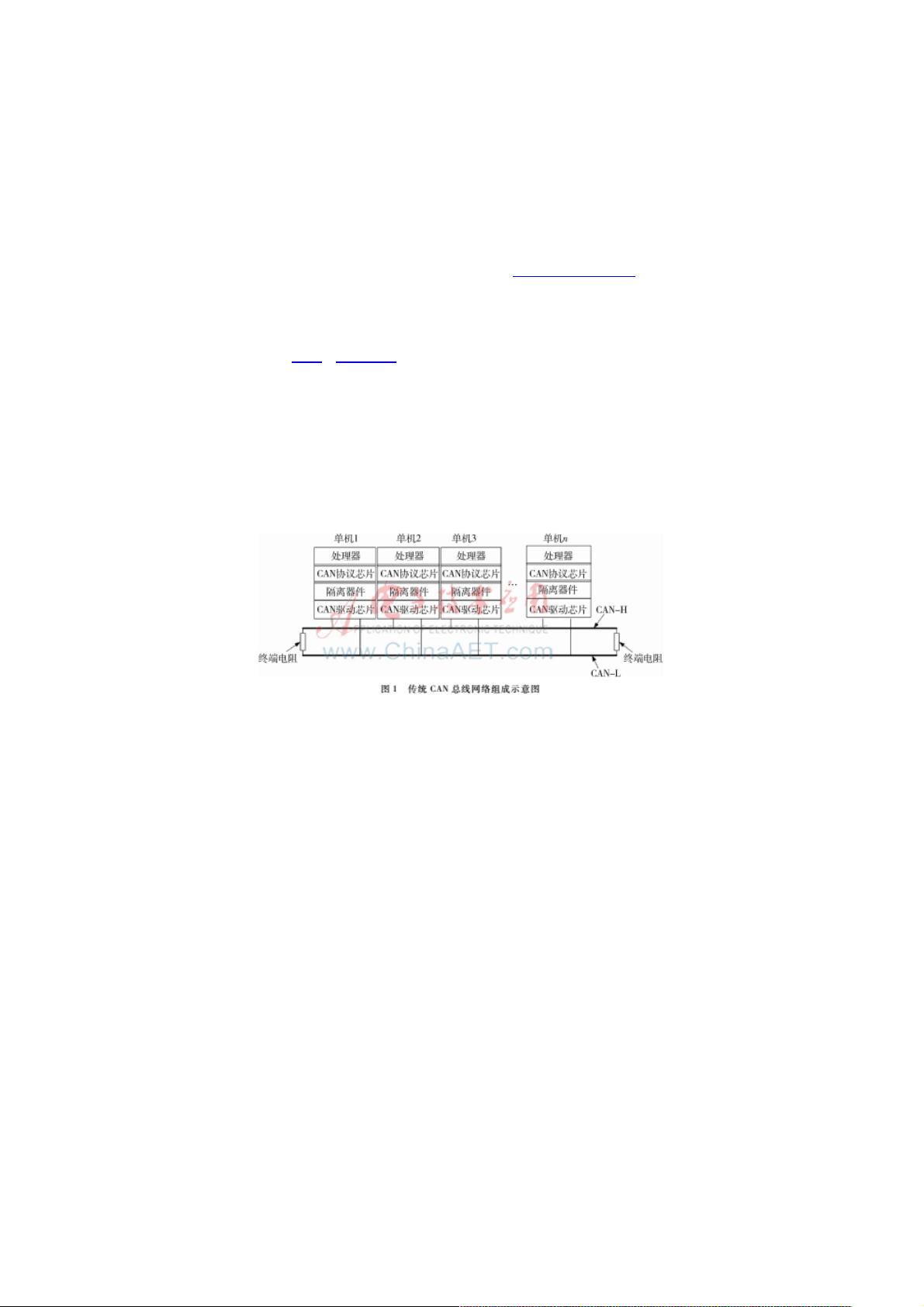
传统的CAN总线网络如图1所示,主要包括单机、CAN总线电缆、终端电阻。单机内部主要包括处理器、CAN总线协议芯
片、隔离器件、CAN总线驱动芯片等[57]。各个单机的驱动芯片的CANH、CANL与总线电缆的CANH、CANL直接连
接。各个CAN总线单机通过CAN总线电缆实现单机的互联互通,从而实现一个设备发送全部设备均可接收的效果。CAN总线
终端电阻挂于CAN总线电缆的两端。
在传统架构下,单机2发送的CAN总线信号可以同时传输给单机1、单机3、单机n,各设备均可以进行应答,从而在传统
的网络架构中任何单机均可以无差别地实现与网络中所有单机的通信,满足了一对多的高效通信,有效提高了系统的通信效率
[89]。但是在这种网络架构下,网络中的单机无法实现对其他单机设备处于本设备的那个方向的识别,从而无法构建出各
单机的网络逻辑关系,不能支持轨道交通编组条件下的快速网络拓扑关系的自动识别。
因此在传统网络架构中,要识别动态编组网络中的逻辑拓扑关系,为用户、应用设计人员提供基础的网络架构信息是无法
完成的。
2自动网络拓扑关系识别网络架构设计自动网络拓扑关系识别网络架构设计
为解决传统网络的不足,本文提出了一种新型的CAN总线网络拓扑架构,以满足CAN总线网络拓扑关系自动识别的目
的。
2.1总体设计总体设计
下载后可阅读完整内容,剩余3页未读,立即下载
2020-02-10 上传
2009-05-26 上传
点击了解资源详情
2021-09-19 上传
2021-09-09 上传
2023-05-07 上传
2021-02-03 上传
2020-11-19 上传
2017-12-02 上传

weixin_38659955
- 粉丝: 4
- 资源: 915
 我的内容管理
展开
我的内容管理
展开







最新资源
- 火炬连体网络在MNIST的2D嵌入实现示例
- Angular插件增强Application Insights JavaScript SDK功能
- 实时三维重建:InfiniTAM的ros驱动应用
- Spring与Mybatis整合的配置与实践
- Vozy前端技术测试深入体验与模板参考
- React应用实现语音转文字功能介绍
- PHPMailer-6.6.4: PHP邮件收发类库的详细介绍
- Felineboard:为猫主人设计的交互式仪表板
- PGRFileManager:功能强大的开源Ajax文件管理器
- Pytest-Html定制测试报告与源代码封装教程
- Angular开发与部署指南:从创建到测试
- BASIC-BINARY-IPC系统:进程间通信的非阻塞接口
- LTK3D: Common Lisp中的基础3D图形实现
- Timer-Counter-Lister:官方源代码及更新发布
- Galaxia REST API:面向地球问题的解决方案
- Node.js模块:随机动物实例教程与源码解析
