VB6.0 MSComm控件:实现六路舵机串口通信与可视化控制
在VB编程中,上位机的实现与单片机之间的串口通信是一项常见的任务,尤其是在工业自动化和机械臂控制中。利用Visual Basic 6.0 (VB),这款功能强大且易学的语言,可以有效地开发出基于串口的通信程序。通过MSComm控件,我们可以轻松地管理多个串口连接,如控制六路舵机,通过数组传输数据。
上位机的设计主要包括以下几个关键步骤:
1. **面向对象编程**:VB作为面向对象的语言,设计时强调模块化和可重用性。通过Frame控件创建区域,可以组织相似功能的控件,如一组OptionButton,以简化代码并避免冗余。
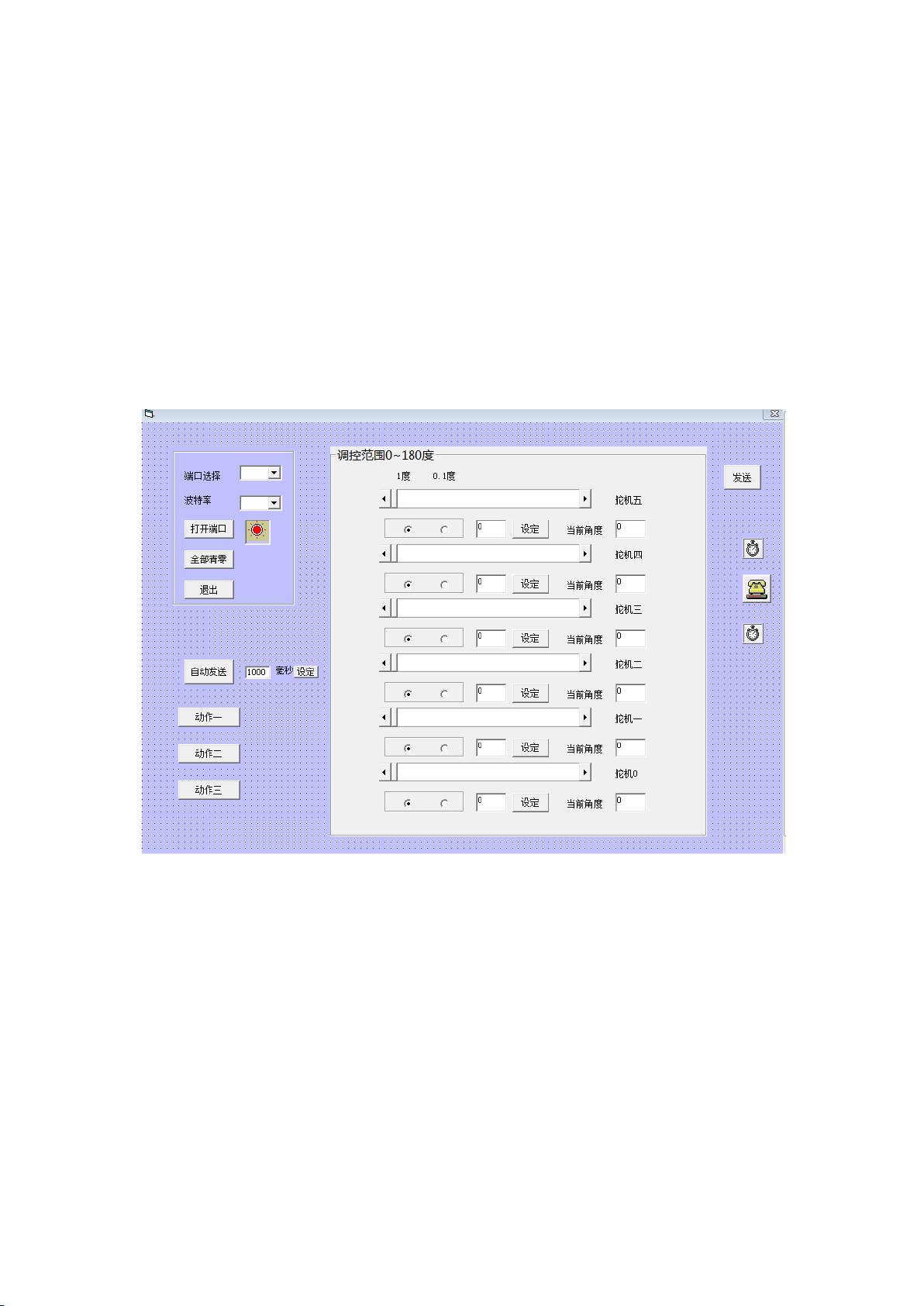
2. **界面布局**:上位机界面被划分为功能部分和可视化调节部分。功能部分包括端口选择、波特率设置、通信控制和动作设置,使用ComboBox控件进行端口选择,提供便捷的交互体验。调节部分使用HScrollbar控件进行粗略和精确的输入调整,OptionButton用于设置步进精度,而Textboxes用于显示实时数据。
3. **MSComm控件**:每个串口通信操作对应一个MSComm控件,通过这些控件设置和管理串口参数。当需要同时处理多个串口时,需要创建多个MSComm控件。MSComm控件的关键属性如“工程”或“部件”选项,用于配置和管理串口连接。
4. **指示灯与状态显示**:通过PictureBox控件显示端口状态,比如红灯代表打开,黑灯代表关闭。这样可以实时反馈通信状态,提高用户界面的直观性。
5. **程序逻辑**:为了实现六路舵机的控制,需要编写代码处理数据发送和接收,确保数组数据的正确传输,并在接收到下位机的数据后更新相应的显示。
利用VB和MSComm控件开发上位机,不仅简化了与单片机的通信流程,还提供了清晰的操作界面和实时数据反馈,这对于实现机械臂和其他自动化系统的控制至关重要。通过理解并掌握这些关键技术,开发者可以更好地构建符合实际需求的上位机应用程序。
上位机可方便地实现与单片机之间进行信息传递交互,能够更加容易对机械手臂
进行控制,实现操作可视化,更加直观,保存重要数据等功能。我们利用 Visual
Basic 6.0(以下简称 VB)来编制上位机,VB 是一种功能强大、简单易学的程序设计
语言。它不但保留了原先 Basic 语言的全部功能,而且还增加了面向对象程序设
计功能。它不仅可以方便快捷地编制适用 于数据处理、多媒体等方面的程序,
而且利用 ActiveX 控件 MSComm 还能十分方便地开发出使用计算机串口的计算机
通信程序。本实验涉及控制六路舵机,所以需要编制上位机实现一次向下位机传
输含有六个数据的数组,同时接受来自下位机的数组,并显示。
整个过程可分为如下几个过程:
一:VB 是面向对象的语言,首先需要绘制程序界面
该上位机大致分为左边的功能部分与右边的可视化调节部分。
功能部分有端口选择,用以选择合适的端口进行串口通信,波特率选择,打开与
关闭端口,动作设置等。
为了便于布局,应用 frame 控件建立区域,再将控件拖到 frame 区域中,对
于功能相同的控件来说,建立控件组的方式会使编程避免重复繁琐,例如
HScrollbar 控件,先向 frame 区域内拖入一个 HScrollbar 控件,再复制,粘贴到 frame
区域内部,则提示是否建立控件组,点击确定即可。这样便为后续编程带来很大
的方便。
调节部分运用 Hscrollbar 控件来粗略调节度数,设定按钮与文本框配合来精
确调节输出度数。用右列文本框实时读取舵机当前角度。用 optionbutton 控件来
选择 hscrollbar 的步进精度,这里分为 0.1 度与 1 度两个不同的选项。由于一组
optionbutton 中在程序运行中只能有一个处于选中状态,根据本程序要求,每一
横列的两个 optionbutton 为一组,这样就需要 frame 控件,在同一个 frame 区域
下载后可阅读完整内容,剩余6页未读,立即下载
2021-12-25 上传
2021-12-23 上传
2012-06-25 上传
2022-09-19 上传
2021-09-21 上传
2022-01-13 上传
点击了解资源详情
2023-03-06 上传
129 浏览量

zgxzb
- 粉丝: 0
- 资源: 3
 我的内容管理
展开
我的内容管理
展开







最新资源
- 几种内部排序算法总结
- 操作系统与.net100题.doc
- matlab 入门教程
- 游戏编程指南.pdf
- Java入门需掌握的30个基本概念
- 80c51的汇编指令集
- 软件开发项目全系列1
- Test-Driven Development by Example.pdf
- JavaScript简单教材JavaScript简单教材
- WLAN身份验证和数据加密
- Absolute+OpenBSD+-+Unix+For+The+Practical+Paranoid+2003
- JDBC电子书(pdf)
- 使用JLINK烧写hex文件.pdf
- 想成为游戏开发人员需要有以下书籍.doc
- windows下cvs服务器安装配置(详)
- Linux kernel API
