ARM PSCI接口手册:Power State Coordination Interface规范
需积分: 9 156 浏览量
更新于2024-07-16
收藏 1.4MB PDF 举报
DEN0022C_Power_State_Coordination_Interface (PSCI) 是ARM系统中的一个关键接口,它专注于系统的电源管理协调。这份文档,ARM DEN0022C,专门针对ARM架构的系统软件,提供了关于PSCI的详细规范和指南。PSCI版本0.2在2013年6月发布了第二个非保密版本,随后在2015年1月进行了升级,发布了PSCI 1.0版本,并对0.2版本进行了修正。
PSCI的作用在于帮助操作系统(OS)和其他系统软件组件协调处理器的不同电源状态,如低功耗模式(如S0、S1、S2、S3等),以实现更高效的能效管理。这个接口定义了硬件和软件之间通信的标准,使得它们能够协调执行电源状态转换,例如在休眠或唤醒时,确保数据的保存和恢复。
这份文档详细列出了PSCI的各种功能特性,包括如何通知处理器进入不同的电源状态,以及在状态转换过程中可能涉及的中断处理和同步机制。它还包含了错误处理和兼容性信息,确保不同厂商的硬件设计在遵循标准的同时,能够无缝协作。
值得注意的是,PSCI文档强调了版权和保密性的保护。未经ARM的明确书面许可,任何形式的复制或实施文档中的信息都必须得到许可,且该技术可能受到专利保护,这表明PSCI是ARM知识产权的重要组成部分。
PSCI的使用对于开发能在低功耗设备上运行的高效应用程序至关重要,特别是在移动设备、物联网设备和嵌入式系统中,电源管理和节能性能是设计者关注的核心要素。通过理解和遵循PSCI规范,开发者可以优化他们的系统设计,减少能耗,延长电池寿命,并满足日益严格的能源效率要求。
DEN0022C_Power_State_Coordination_Interface.pdf是一份深入介绍ARM平台上的电源管理协调接口的重要参考资料,涵盖了接口设计、使用方法、版本更新及版权政策,是开发人员和系统工程师在设计低功耗、高性能系统时不可或缺的参考资料。
Assumptions and recommendations
14 Copyright
2012, 2013, 2015 ARM. All rights reserved. ARM DEN 0022C
Non-Confidential
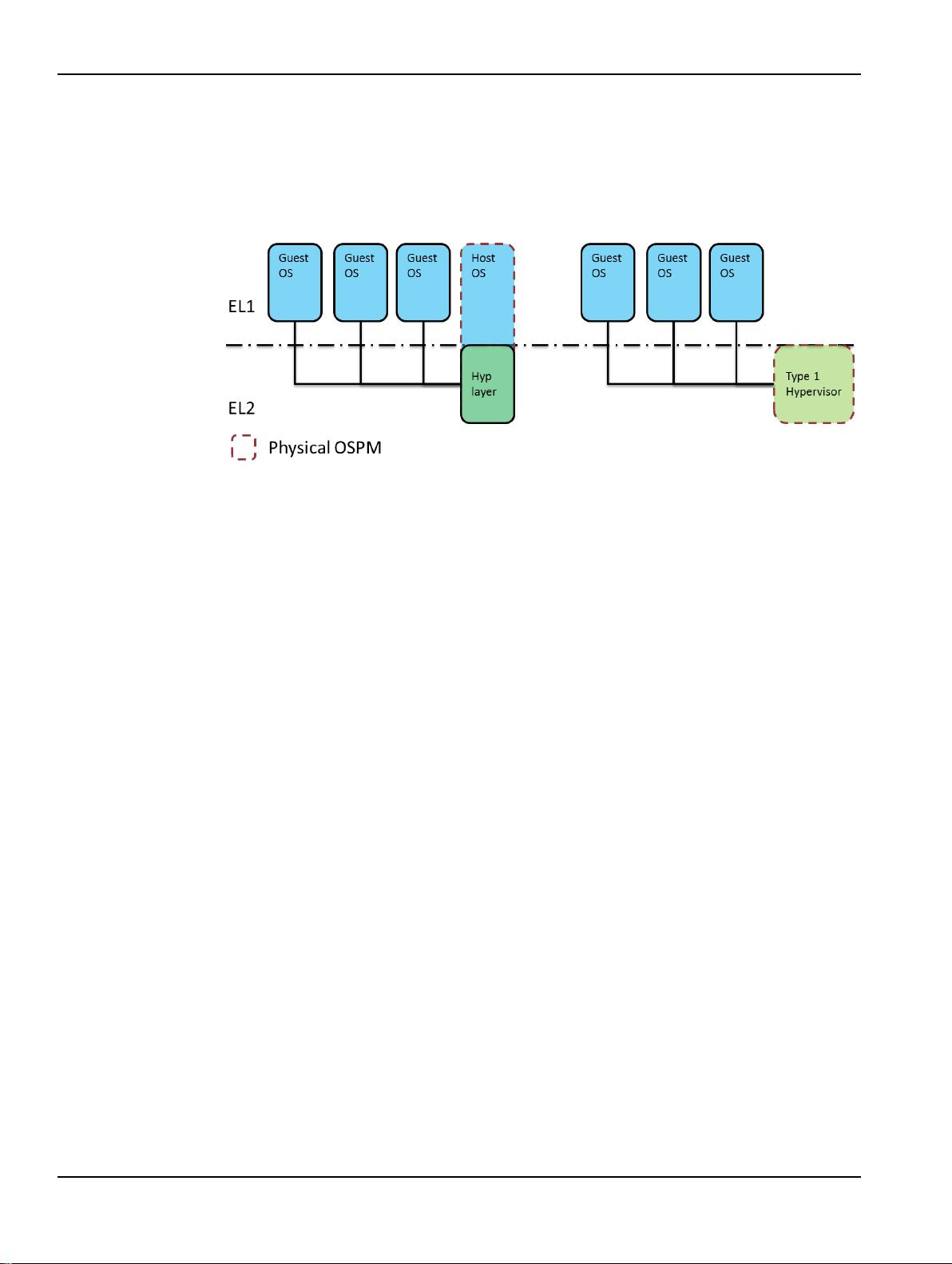
Virtual OSPM: This is an OSPM present in a guest OS running a virtual machine, which
selects virtual, rather than physical power states.
With type 2 hypervisors, the physical OSPM resides in the host. Actual power policy is
controlled from a Rich OS typically running at EL1. The physical OSPM is contained in this
Rich OS. This layer has a physical view of the cores. An example of this is shown below in
Figure 2 on the left hand side.
Figure 2 Typical Power management models in virtualization
For the power management functions covered in this document, type 2 hypervisor behavior
depends on the calling OS.
If the caller is the host, the hypervisor complies with the power request or allows the call to
pass straight through to the secure platform firmware. The hypervisor typically only
performs any necessary operations resulting from the call, for example, saving state on a
powerdown if needed. From this point onwards, the hypervisor calls through to the secure
platform firmware using the parameters supplied by the caller. If no special operations are
required, the hypervisor does not even trap calls from the host, and instead routes them
directly to the secure platform firmware.
When a type 2 hypervisor is implemented, guests use a virtual OSPM. They can also issue
power requests through the PSCI APIs, but the requests are issued in relation to virtual
cores and virtual power states. These requests are trapped by the hypervisor which issues
them back to the physical OSPM. This component can then determine whether physical
power management is required. For these guests, the power calls effectively terminate at
the hypervisor.
With a type 1 hypervisor, power policy is typically owned entirely by the hypervisor. This is
shown on the right hand side in Figure 2. The physical OSPM is implemented in the
hypervisor. In this case all guests have a virtualized view of the cores. The hypervisor
determines from the virtual power states of the guests whether physical power control is
required, and if so uses the PSCI API to coordinate with the secure platform firmware.
Guests can also use this API to communicate virtual power requirements to the hypervisor.
For these guests the calls effectively terminate at the hypervisor.
In some cases, type 1 hypervisors delegate power management to a privileged guest. In
these cases, the physical OSPM is implemented in that privileged guest. This power
management approach is equivalent to the model described above for type 2 hypervisors,
shown in Figure 2.


剩余83页未读,继续阅读
2020-07-21 上传
2021-09-14 上传
2023-01-02 上传
2022-09-20 上传
2022-07-14 上传
2022-07-14 上传
2022-09-23 上传
2024-09-08 上传
2022-09-24 上传

sanyanamao
- 粉丝: 2
- 资源: 3
 我的内容管理
展开
我的内容管理
展开







最新资源
- 天池大数据比赛:伪造人脸图像检测技术
- ADS1118数据手册中英文版合集
- Laravel 4/5包增强Eloquent模型本地化功能
- UCOSII 2.91版成功移植至STM8L平台
- 蓝色细线风格的PPT鱼骨图设计
- 基于Python的抖音舆情数据可视化分析系统
- C语言双人版游戏设计:别踩白块儿
- 创新色彩搭配的PPT鱼骨图设计展示
- SPICE公共代码库:综合资源管理
- 大气蓝灰配色PPT鱼骨图设计技巧
- 绿色风格四原因分析PPT鱼骨图设计
- 恺撒密码:古老而经典的替换加密技术解析
- C语言超市管理系统课程设计详细解析
- 深入分析:黑色因素的PPT鱼骨图应用
- 创新彩色圆点PPT鱼骨图制作与分析
- C语言课程设计:吃逗游戏源码分享
