
环境实验室温、湿度模糊控制系统设计环境实验室温、湿度模糊控制系统设计
传统的温、湿度闭环控制通常采用开关控制或PID控制,前者实现简单但精度差,后者精度高,但需建立数学模
型,参数整定要求较高,而在温湿度非线性复杂变化的环境下,不易建模。模糊控制理论是能够模拟人脑智
能,随环境变化的自适应控制技术,适合于非线性系统和难以用数学模型描述的复杂系统。进一步可以采用神
经网络与模糊推理结合的控制新模式。 1 环境实验室温湿度监控系统结构 环境实验室温、湿度监测控
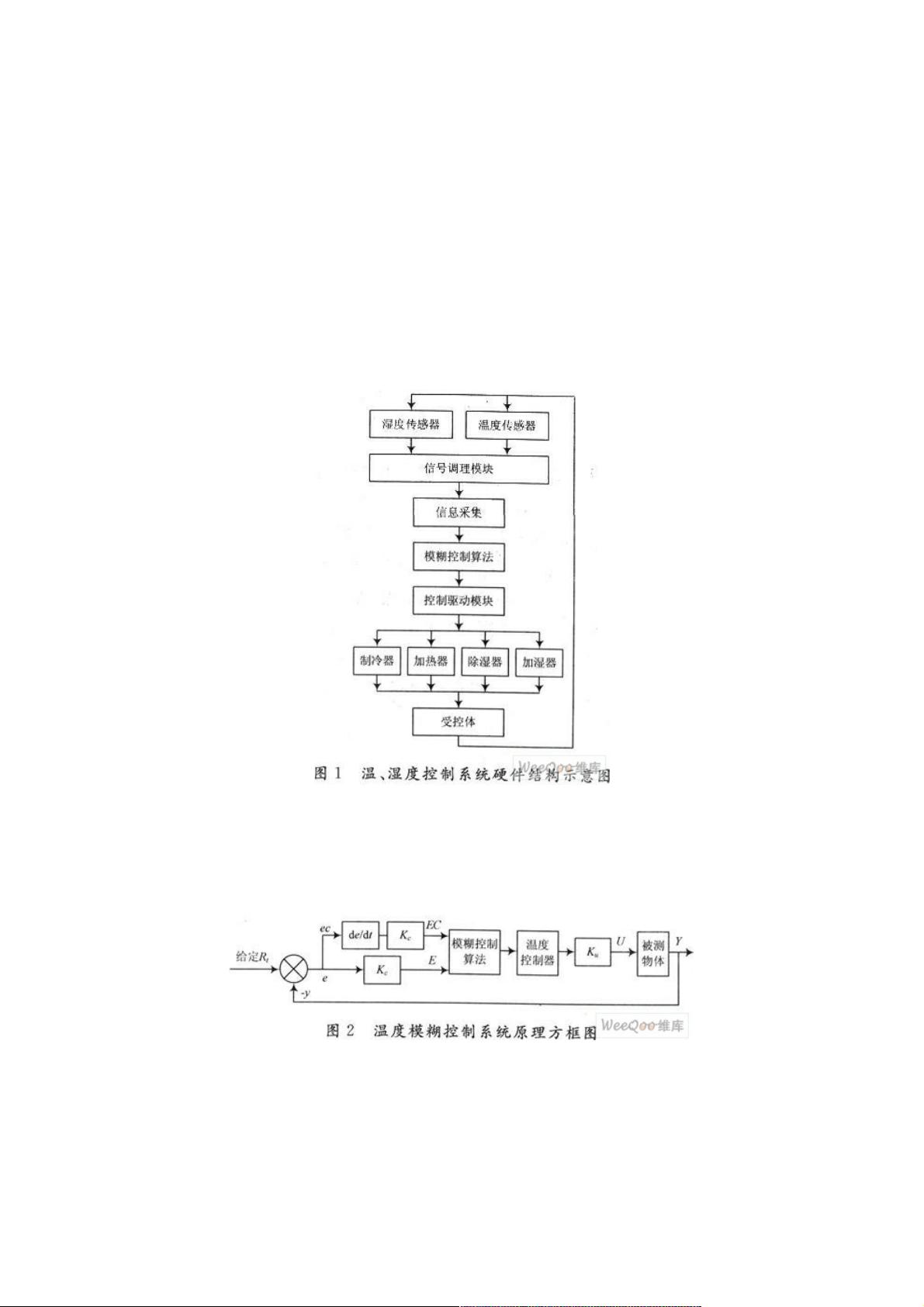
制机构见图1。温、湿度传感器测得的信号经过调理,输入到模糊控制算法模块,产生决策信号控制驱动件(加热
器、制冷器、加湿器、除湿器),保持环境实验室温、湿度恒定在设定值。 2 控制系统模糊控制机
传统的温、湿度闭环控制通常采用开关控制或PID控制,前者实现简单但精度差,后者精度高,但需建立数学模型,参数
整定要求较高,而在温湿度非线性复杂变化的环境下,不易建模。模糊控制理论是能够模拟人脑智能,随环境变化的自适应控
制技术,适合于非线性系统和难以用数学模型描述的复杂系统。进一步可以采用神经网络与模糊推理结合的控制新模式。
1 环境实验室温湿度监控系统结构
环境实验室温、湿度监测控制机构见图1。温、湿度传感器测得的信号经过调理,输入到模糊控制算法模块,产生决策信
号控制驱动件(加热器、制冷器、加湿器、除湿器),保持环境实验室温、湿度恒定在设定值。
2 控制系统模糊控制机理
典型的模糊逻辑控制由模糊化、模糊推理和清晰化三部分组成。下面以温度控制为例来具体说明。依据传统模糊控制模
型,本设计中温度模糊控制系统原理如图2所示。
模糊控制器选用双输人单输出控制方式,以温度误差e和误差变化率ec作为输入变量,以u作为输出变量。模糊子集为
E=EC=U={NB,NM,NS,ZE,PS,PM,PB}={负大,负中,负小,零,正小,正中,正大),其论域为:e=ec=u=[-3,3]=
{-3,-2,-1,0,1,2,3}。隶属度函数采用三角分布函数,如图3所示。
下载后可阅读完整内容,剩余3页未读,立即下载

weixin_38535848
- 粉丝: 8
- 资源: 926
 我的内容管理
展开
我的内容管理
展开







最新资源
- C++多态实现机制详解:虚函数与早期绑定
- Java多线程与异常处理详解
- 校园导游系统:无向图实现最短路径探索
- SQL2005彻底删除指南:避免重装失败
- GTD时间管理法:提升效率与组织生活的关键
- Python进制转换全攻略:从10进制到16进制
- 商丘物流业区位优势探究:发展战略与机遇
- C语言实训:简单计算器程序设计
- Oracle SQL命令大全:用户管理、权限操作与查询
- Struts2配置详解与示例
- C#编程规范与最佳实践
- C语言面试常见问题解析
- 超声波测距技术详解:电路与程序设计
- 反激开关电源设计:UC3844与TL431优化稳压
- Cisco路由器配置全攻略
- SQLServer 2005 CTE递归教程:创建员工层级结构
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


