TwinCAT NC PTP实用教程:MC2 V1.06 - 提升制造业自动化
需积分: 10 32 浏览量
更新于2024-07-18
收藏 7.78MB PDF 举报
本教程详细介绍了TwinCAT-NC-PTP(Profinet Time Synchronisation Protocol),这是德国贝克霍夫(BECKHOFF)公司针对PC-based运动控制的一款实用软件。TwinCAT NC是基于TcMc.lib和TcMc2.lib运动控制库,专为TwinCAT Version 2.11 Build 2224设计,特别强调了其在2010年后硬件更新后对Chapters 6-11的适应性。
在当今中国制造业环境中,随着自动化需求的增长,TwinCAT NC的优势尤为显著。它支持多种伺服驱动器接口,包括脉冲、模拟量、现场总线(如Profinet)和以太网,使得用户在选择伺服驱动器和电机时具有更大的灵活性,克服了传统方式A(厂家软件工具)和B(第三方运动控制系统)可能面临的局限性。这种方式C(PLC厂家的运动控制系统)虽然通讯问题较少,但限制了用户的选择范围。
TwinCAT NC的核心价值在于它实现了NC(Numerical Control,数控)与PLC(Programmable Logic Controller,可编程逻辑控制器)的无缝集成,使得开发者能够在不受伺服驱动器和电机限制的情况下,在任何计算机上进行程序的模拟调试。此外,作者Lizzy Chen凭借丰富的经验和深厚的技术背景,分享了她在贝克霍夫公司工作期间所积累的知识和技巧,涵盖了软件工作原理、软件模型、实际应用中的操作步骤以及配套章节的示例程序。
本教程旨在帮助工业自动化工程师全面理解和掌握TwinCAT NC,无论是初学者还是高级用户,都能从中获益,提升伺服驱动器和电机的控制能力,从而提高产业机械的自动化水平,降低人力成本,提升整体生产效率。通过阅读这本书,读者不仅能学习到TwinCAT NC的基础理论,还能获得实际操作的指导,使他们在工业自动化领域更具竞争力。
TwinCAT NC PTP 实用教程_MC2_Part1.docx
- 11 -
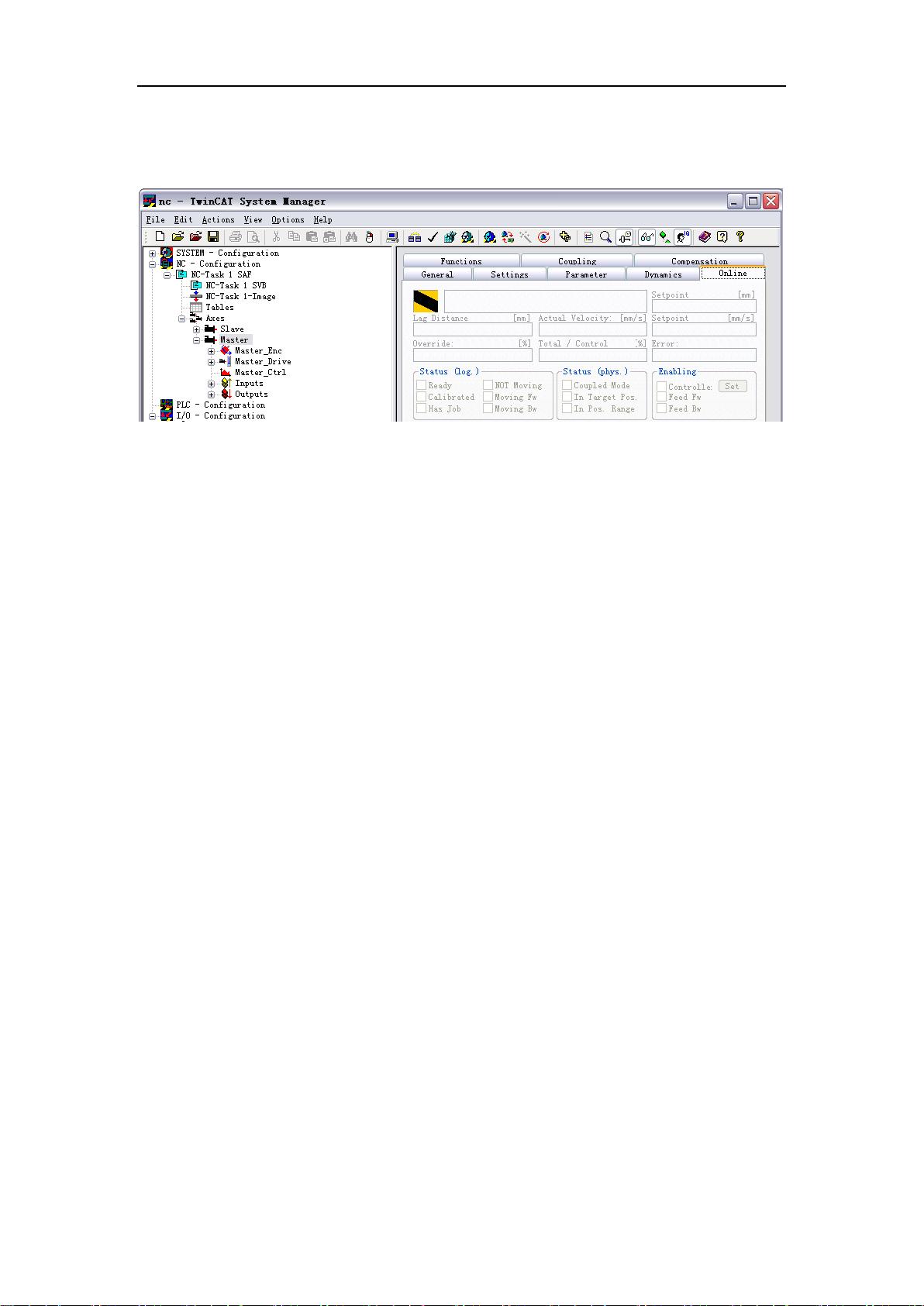
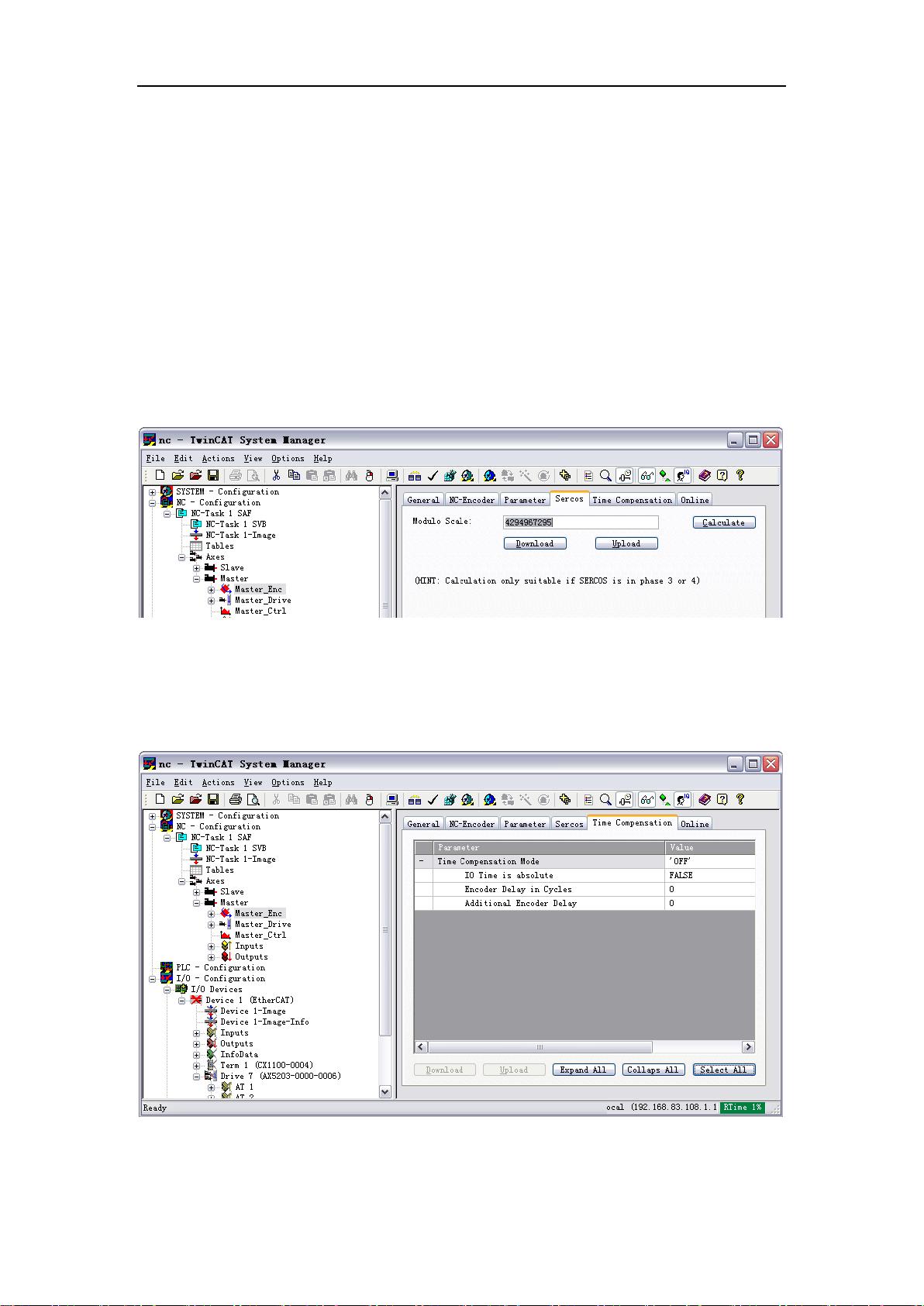
第五步:Axis 添加完成。
Axis 成功添加后,选中左边的树形结构的 Axis 名称时,右边主窗体轴的调试页面组。此
时,这些页面都是灰色的,因为该配置还没有激活。
当目标系统为 Config mode,Online 页面不可用,此时,需要激活配置并切换到 Running
模式,Online 页面才变成彩色,功能按钮可用。
到这里为止,一个虚轴就建成了。如果没有驱动器和电机,要练习 NC 轴的配置并调试 PLC
运动控制程序,可以直接跳转到第 4 章。
剩余157页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2022-07-15 上传
2019-12-10 上传
2018-03-28 上传
2021-03-26 上传

dodo_code
- 粉丝: 806
- 资源: 32
 我的内容管理
展开
我的内容管理
展开







最新资源
- CoreOS部署神器:configdrive_creator脚本详解
- 探索CCR-Studio.github.io: JavaScript的前沿实践平台
- RapidMatter:Web企业架构设计即服务应用平台
- 电影数据整合:ETL过程与数据库加载实现
- R语言文本分析工作坊资源库详细介绍
- QML小程序实现风车旋转动画教程
- Magento小部件字段验证扩展功能实现
- Flutter入门项目:my_stock应用程序开发指南
- React项目引导:快速构建、测试与部署
- 利用物联网智能技术提升设备安全
- 软件工程师校招笔试题-编程面试大学完整学习计划
- Node.js跨平台JavaScript运行时环境介绍
- 使用护照js和Google Outh的身份验证器教程
- PHP基础教程:掌握PHP编程语言
- Wheel:Vim/Neovim高效缓冲区管理与导航插件
- 在英特尔NUC5i5RYK上安装并优化Kodi运行环境
