PIC单片机实现RS-232到CAN通信转换
需积分: 10 10 浏览量
更新于2024-09-09
收藏 169KB DOC 举报
"该文介绍了一种基于PIC单片机的RS-232转CAN通信适配卡的设计,旨在实现RS-232串口与CAN总线之间的双向通信。适配卡允许PC通过串口接收和发送RS-232格式的数据,并将其转换为CAN协议的报文,反之亦然,从而利用CAN总线的高波特率、长距离、大容量和高可靠性的优点。文章详细介绍了CAN总线的特点,包括多主工作模式、优先级仲裁、错误检测和恢复机制等。设计的适配卡硬件包括PIC16F877A单片机、SJA1000T CAN控制器、TJA1050 CAN总线驱动器和MAX232 RS-232驱动器。适配卡还具备A/D转换功能,能将模拟信号转换后通过CAN总线发送给上位机。"
本文详细阐述了一个基于PIC单片机的RS-232转CAN通信适配卡的设计方案,该适配卡的主要任务是桥接传统的串行通信接口RS-232与高性能的CAN(Controller Area Network)总线。RS-232是一种广泛应用于PC通信的标准接口,而CAN总线因其高效率、强鲁棒性和适应性在工业自动化、汽车电子等领域得到了广泛应用。
CAN总线的特性包括其多主站工作模式,每个节点都可以发起通信,通过非破坏性的总线仲裁机制解决冲突。此外,CAN总线支持不同优先级的节点,报文依据ID进行过滤,实现点对点或一点对多点的通信。其通信速度可高达1Mbps,通信距离可达10公里(低速模式下)。CAN总线的报文结构简洁,传输速度快,且包含CRC校验,确保数据的准确性。
适配卡硬件设计中,选用的PIC16F877A单片机作为核心处理器,负责数据处理和协议转换。SJA1000T是独立的CAN通信控制器,用于执行CAN协议,而TJA1050作为CAN总线驱动器,增强信号传输能力。MAX232则用于RS-232电平的转换,使PC可以通过串口连接到CAN网络。适配卡还集成了10位精度的A/D转换器,能够采集模拟信号并转化为数字数据,通过CAN总线发送给上位机。
通过这种适配卡,用户可以利用VC编程的串口通信程序,在Windows操作系统中创建一个简单的终端应用程序,实现RS-232与CAN网络之间的数据交换,实现多主机通信,如点对点和一点对多点的通信模式。这为基于CAN网络的分布式系统提供了便利,尤其适用于需要大量节点交互数据的复杂环境。
基于 PIC 单片机的 RS-232 转 CAN 通信适配卡设计
时间:2008-04-25 来源: 作者:刘宸 赵刚 点击:1499 字体大小:【大 中 小】
CAN 总线-控制器局部网(CAN)国际标准(ISO11898)。CAN 总线与
一般的通信总线相比,它的数据通信具有突出的可靠性、实时性和灵活性。其特点可概括
如下:CAN 为多主方式工作。在报文标识符上,各节点分成不同的优先级。采用非破坏总
线仲裁技术。只需通过对报文的标识符滤波即可实现点对点、一点对多点方式传送接收数
据。直接通信距离最远可达零 10km(速率 5kbps 以下);通信速率最高可达到 1Mbps(此
时通讯距离最长为 40m)。CAN 上的节点数主要取决于总线驱动电路,目前可达 110 个。
报文采用短帧结构,传输时间短,受到干扰的概率低。每帧信息都有 CRC 校验及其他检错
措施,具有极好的检错效果。通信介质可为双绞线、同轴电缆或光纤,选择灵活。节点在
错误严重的情况下具有自动关闭输出功能,使得其他节点的操作不受影响。它具有较高的
性能价格比。CAN 协议是建立在国际标准组织的开放系统互联模式基础上的,由于 CAN
的数据结构简单,又是范围较小的局域网,因此不需要其他中间层,应用层数据直接取自
数据链路层或直接向链路层写数据。结构层次少,有利于系统中实时控制信号的传送。
本实验通信网络通过 CAN 总线传输数据,设计的 CAN-RS-232 通信适配卡,可挂接在
通信网络的任一节点位置,对于通过 RS-232 总线连入 CAN 网络的 PC,可用 WINDOWS
自带的超级终端或者我们用 VC 编写的串口操作程序来接收和发送数据,可以实现点对点,
及一点对多点的通信,实现 CAN 协议里的数据帧和远程请求帧的传送所谓远程请求帧就是
接收端通过发送远程帧启动其资源节点传送它们各自的数据,板卡还可实现 10 位精度的
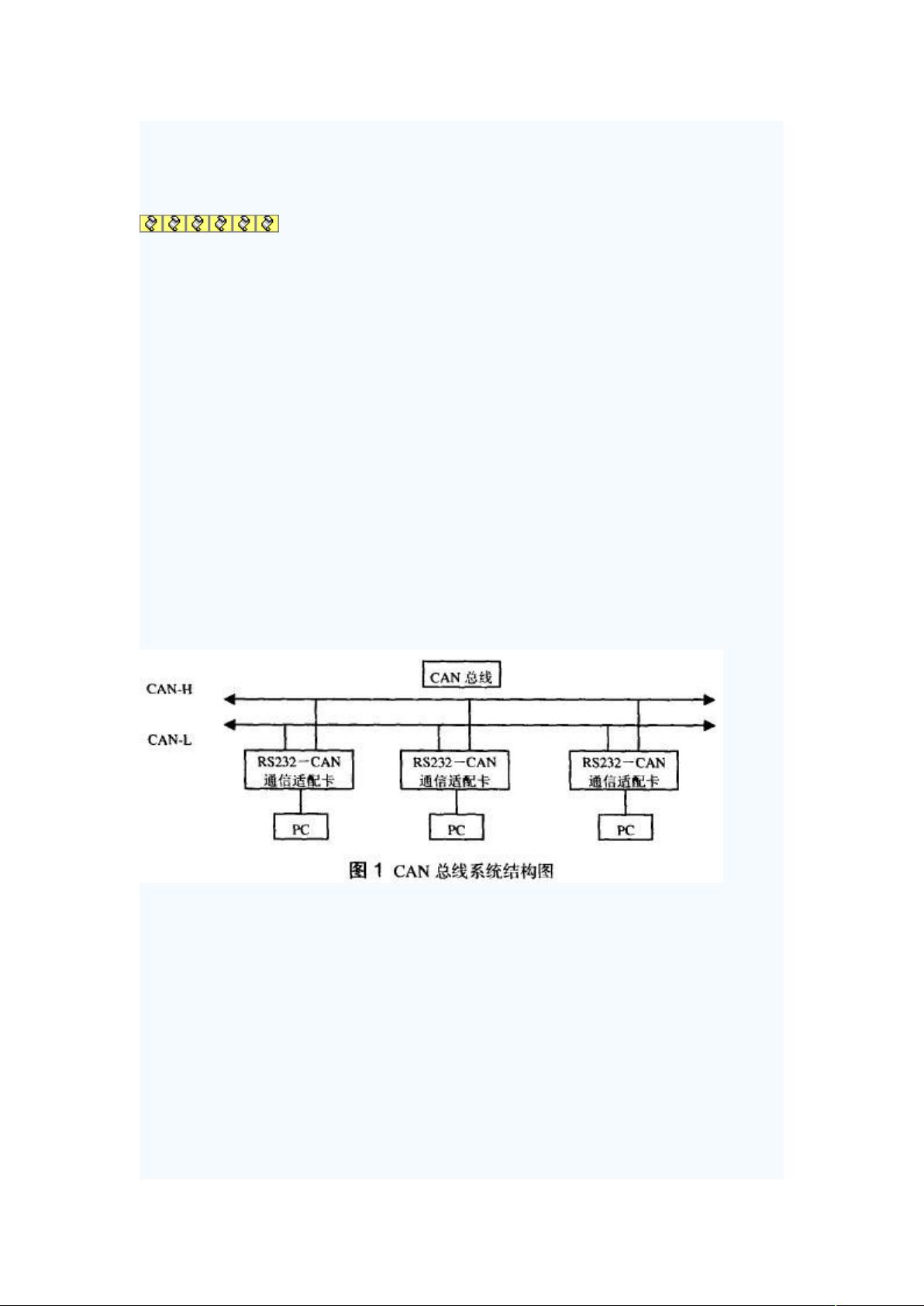
A/D 转换并将得到的数据通过 CAN 总线上传给上位机 CAN 总线系统结构如图 1 所示:
1 系统硬件设计
板卡电路主要由四部分组成:PIC16F877A 单片机、独立 CAN 通信控制器
SJA1000T、CAN 总线驱动器 TJA1050 和 RS-232 总线驱动器 MAX232。主要实现基于
CAN 总线的数据传输,同时通过 RS-232 把 Pc 作为终端接人 CAN 总线以及采集模拟信号
并通过 CAN 总线上传给上位机。SJA1000T 是集成的独立 CAN 控制器(与 PHILIPS 早期
的 CAN 控制器 PCA82C200 完全兼容),它负责完成 CAN 总线通信协议的物理层和数据
链路层的功能。对于微处理器来说,它相当于一个存储器 I/O 映象设备。由于 CAN 控制器
和微控制器内部都有自己的时钟产生电路,为了让两者之间协调,外加了 10M 晶振在微
控制器上作为整个系统的时钟,并将微控制器的时钟输出作为 CAN 控制器的时钟输入;
SJA1000T 的中断输出信号/INT 接到单片机的 INT 中断,但也可通过查询方式实现单片机
与 CAN 控制器的通信;为了使 CAN 控制器和微控制器能同时可靠的复位,外加了手动复
下载后可阅读完整内容,剩余5页未读,立即下载
2020-11-19 上传
2009-12-18 上传
2021-10-01 上传
2023-09-25 上传
2023-05-27 上传
2024-10-26 上传
2024-10-26 上传
2023-09-09 上传
2024-02-01 上传

fsgfsgfsgfsg
- 粉丝: 0
- 资源: 3
 我的内容管理
展开
我的内容管理
展开







最新资源
- StarModAPI: StarMade 模组开发的Java API工具包
- PHP疫情上报管理系统开发与数据库实现详解
- 中秋节特献:明月祝福Flash动画素材
- Java GUI界面RPi-kee_Pilot:RPi-kee专用控制工具
- 电脑端APK信息提取工具APK Messenger功能介绍
- 探索矩阵连乘算法在C++中的应用
- Airflow教程:入门到工作流程创建
- MIP在Matlab中实现黑白图像处理的开源解决方案
- 图像切割感知分组框架:Matlab中的PG-framework实现
- 计算机科学中的经典算法与应用场景解析
- MiniZinc 编译器:高效解决离散优化问题
- MATLAB工具用于测量静态接触角的开源代码解析
- Python网络服务器项目合作指南
- 使用Matlab实现基础水族馆鱼类跟踪的代码解析
- vagga:基于Rust的用户空间容器化开发工具
- PPAP: 多语言支持的PHP邮政地址解析器项目
