利用Raspberry Pi构建六自由度机器人
需积分: 15 123 浏览量
更新于2024-07-20
收藏 11.16MB PDF 举报
"Raspberry Pi Robotics Essentials" 是一本由 Richard Grimmett 编著的书籍,专注于利用 Raspberry Pi 开发高级机器人应用。书中详细介绍了如何配置和编程 Raspberry Pi,构建双足机器人(biped),并为其添加各种功能,如运动控制、避障传感器、路径规划以及远程访问。
在第一章“配置和编程 Raspberry Pi”中,作者首先讲解了如何为 Raspberry Pi 连接电源,然后逐步指导读者设置一个完整系统,使其准备好连接各种设备和软件,以开发复杂的机器人应用。这一过程包括了初始设置、操作系统安装以及必要的软件配置。
第二章“构建双足机器人”向读者展示了如何制作机器人的机械结构,无论是通过3D打印、购买还是自行制作腿部和躯干。这部分内容对于机器人硬件爱好者来说尤其重要,因为它是机器人实体化的基础。
第三章“双足机器人的运动控制”讨论了如何编程使机器人行走、挥手、装死或执行其他动态动作。这部分涉及到机器人运动学和动力学的知识,让机器人能够协调地移动。
第四章“使用传感器避障”介绍了如何添加红外传感器,使得机器人能感知周围环境,避免碰撞障碍物。这涉及传感器技术、信号处理和避障算法。
第五章“路径规划与双足机器人”讲解了如何规划机器人的移动路径,使其能从一点A移动到另一点B。这部分内容可能涵盖搜索算法、导航技术和实时定位技术。
第六章“为双足机器人添加视觉”详细阐述了如何连接摄像头,以及相应的硬件和软件设置,以便将视觉数据输入到机器人系统中。这可能涉及到图像处理、计算机视觉和目标识别技术。
第七章“远程访问你的双足机器人”介绍了如何将 Raspberry Pi 配置为无线接入点,从而实现对机器人的远程控制。这部分内容涵盖了网络配置、无线通信和远程操作的实现。
这本书是 Raspberry Pi 在机器人领域的实践指南,适合对机器人和嵌入式系统感兴趣的读者,无论他们是初学者还是有经验的开发者,都能从中获取宝贵的实践经验和技术知识。通过学习书中的内容,读者可以掌握从零开始构建一个具有六自由度的行走机器人,并赋予它多种智能行为的能力。
[ 1 ]
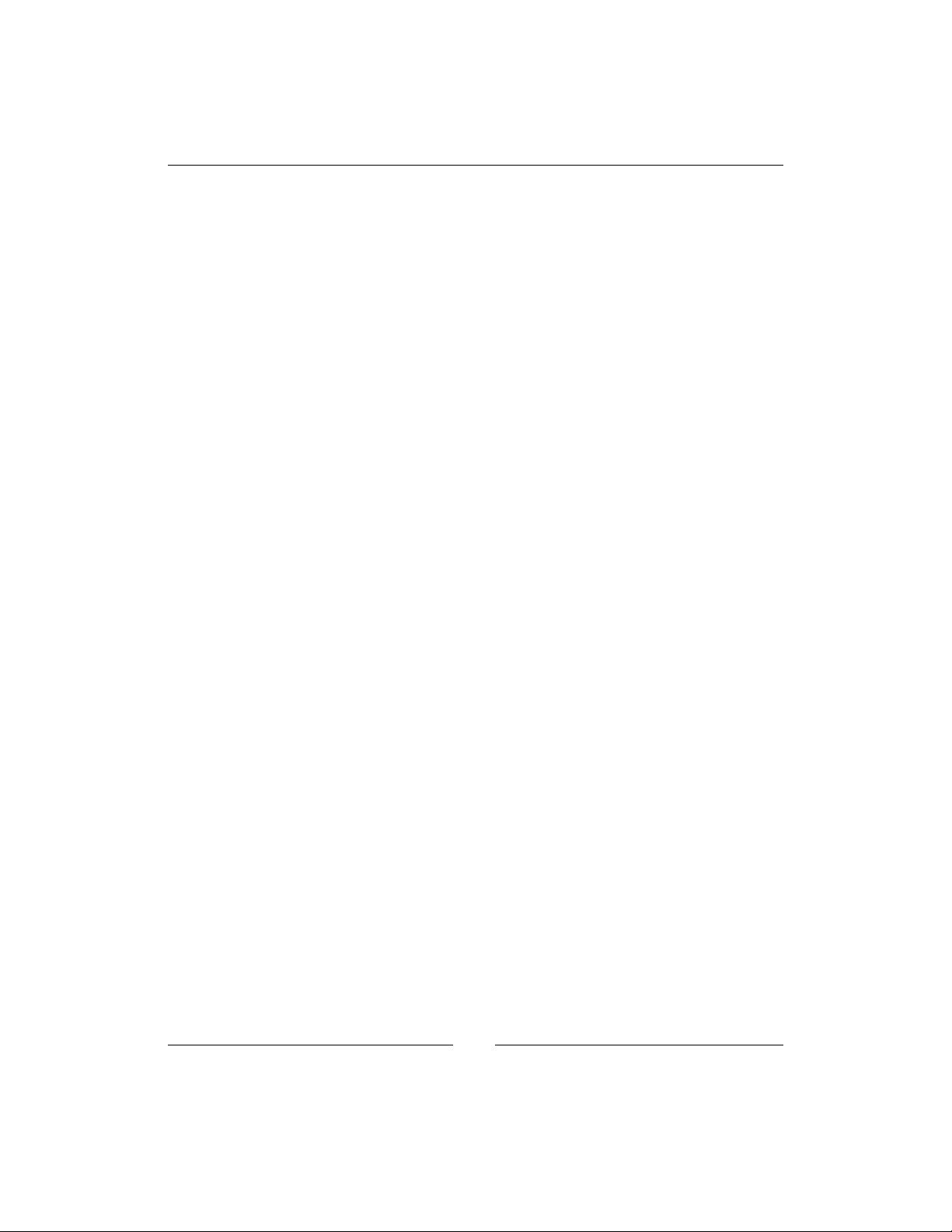
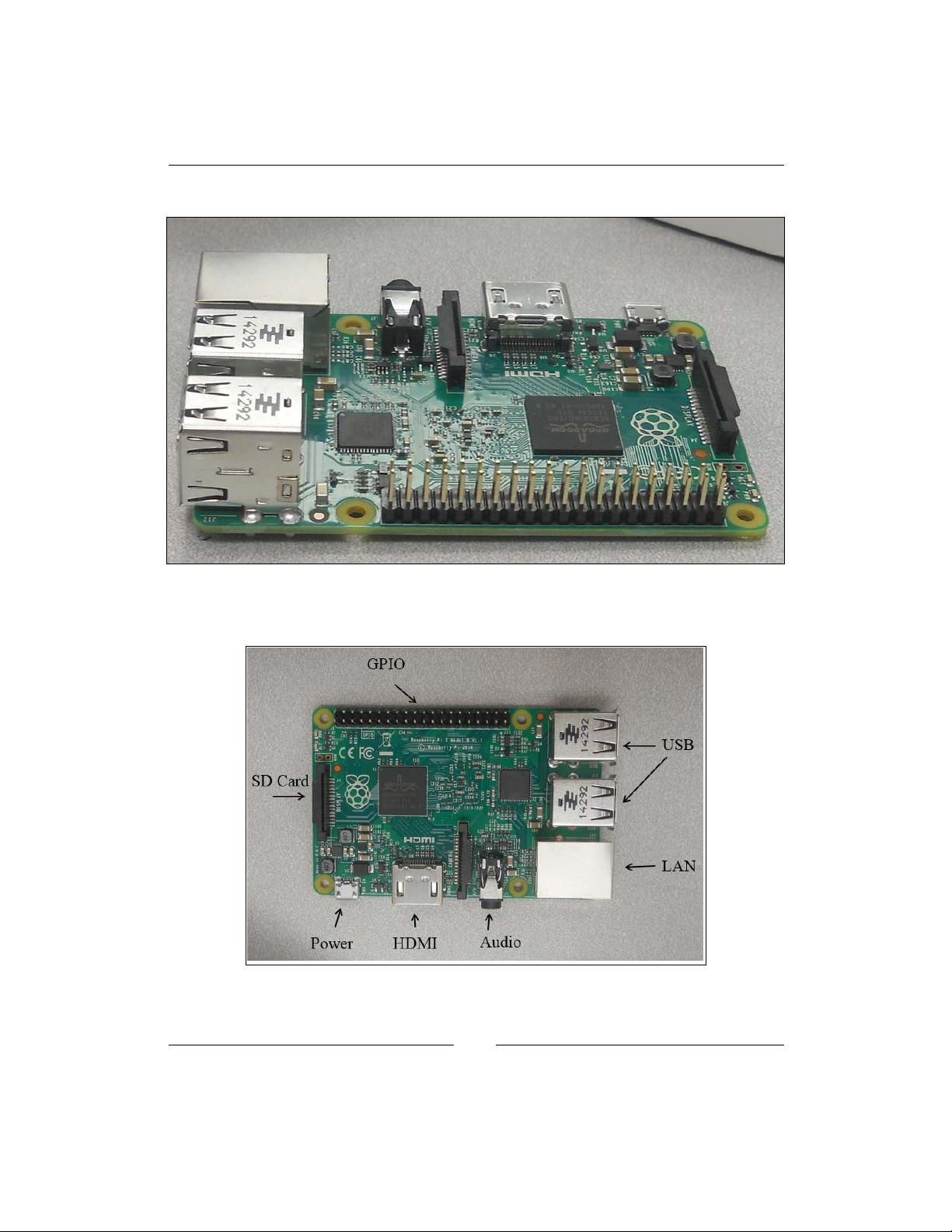
Conguring and
Programming Raspberry Pi
Robots are beginning to inltrate our world. They come in all shapes and sizes,
with a wide range of capabilities. And, just like the evolution of the personal
computer before them, much of what is happening in the robot development world
is coming from hobbyists and do-it-yourselfers that are using a new generation of
inexpensive hardware and free, open source software to build machines with all
kinds of amazing capabilities. In this book, you will learn how to build robots by
building a robot, a four-legged quadruped with sensor and vision capabilities. The
skills you will learn, however, can also be used on a wide variety of walking, rolling,
swimming, or ying robots.
In this chapter, you'll learn:
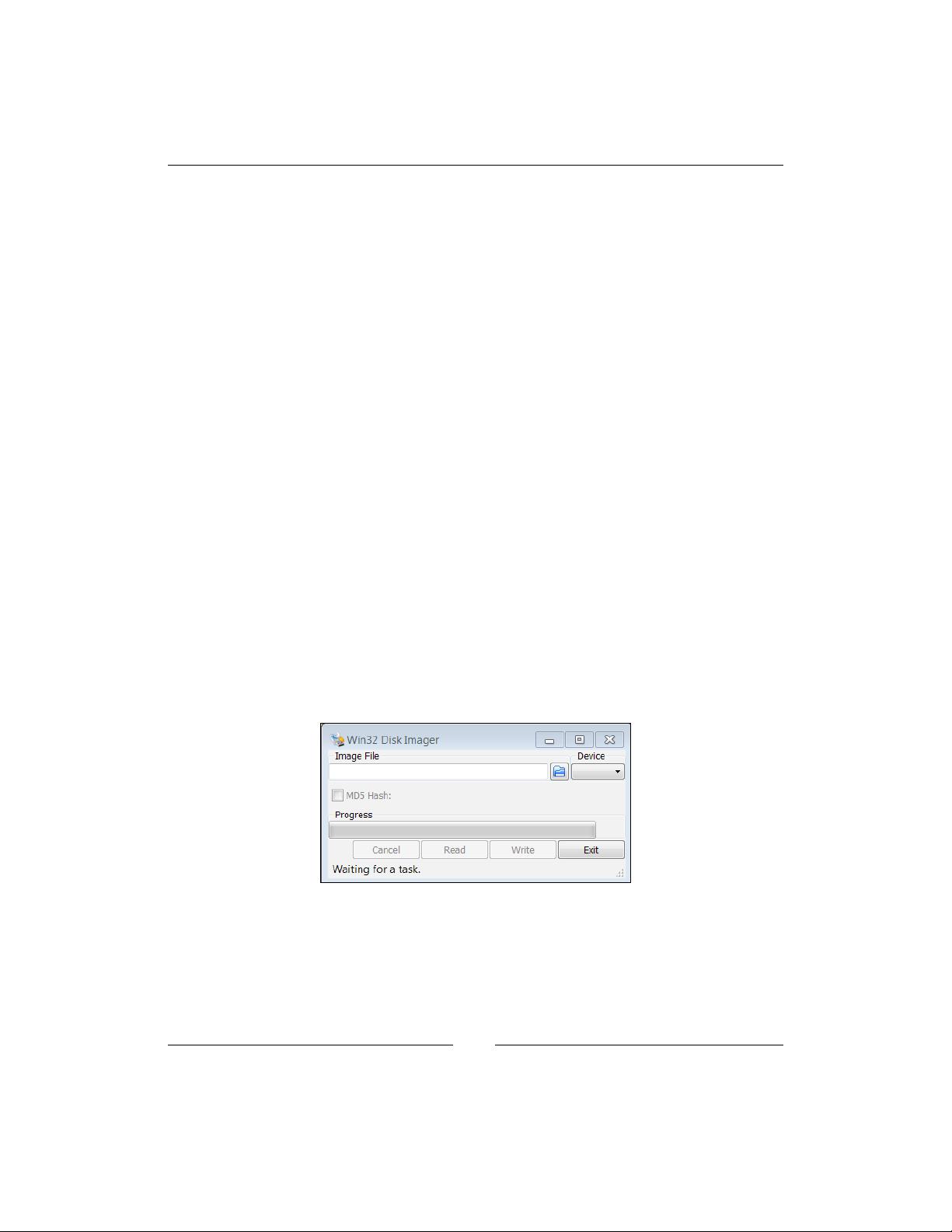
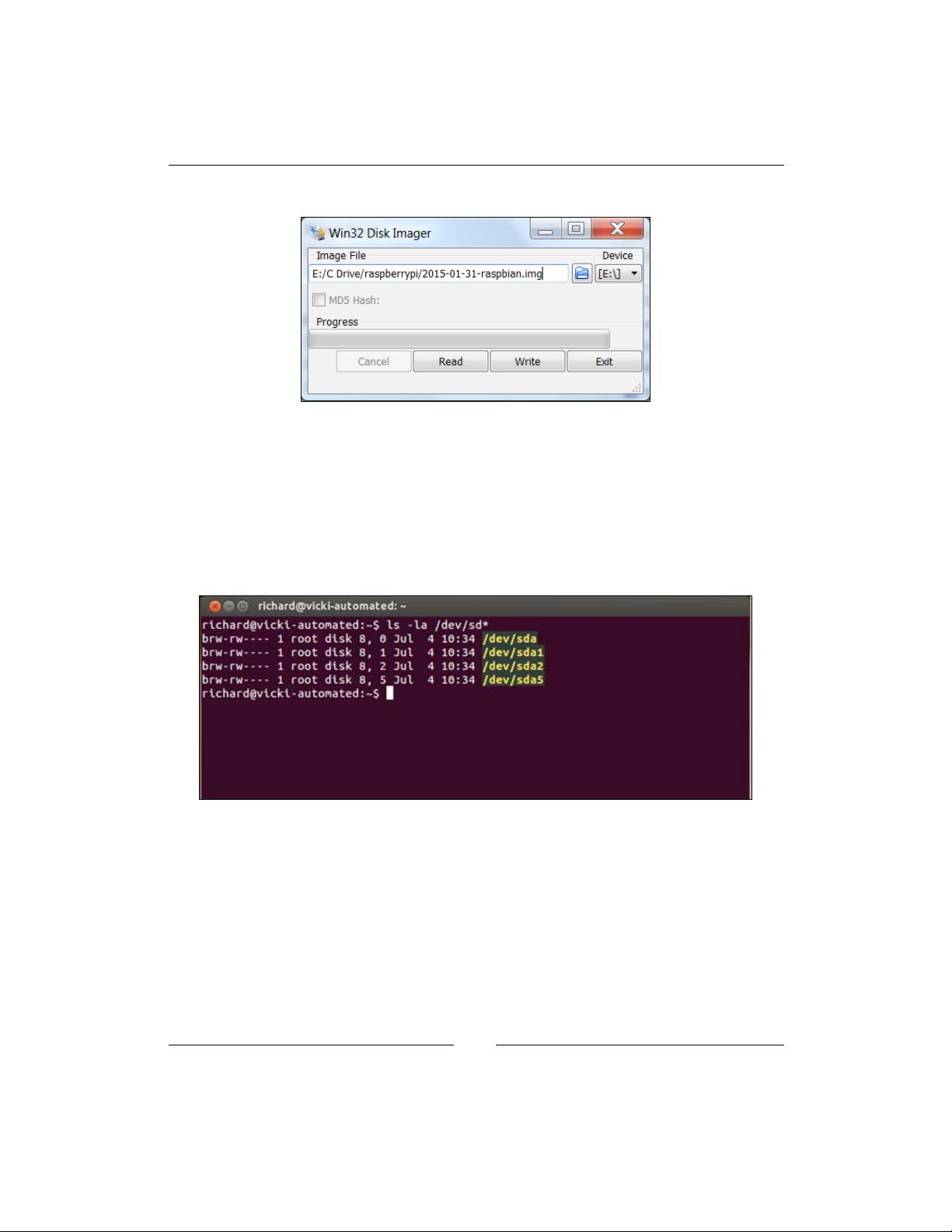
• How to configure your Raspberry Pi, the control center of your robot,
with the Raspbian operating system
• How to set up a remote development environment so you can program
your robot
• Basic programming skills in both Python and C so you can both create and
edit the programs your robot will need to do all those amazing things
剩余157页未读,继续阅读
2015-08-21 上传
2016-04-28 上传
2020-07-05 上传
2023-05-13 上传
2023-12-19 上传
2023-07-30 上传
2024-01-13 上传
2023-05-30 上传
2023-05-10 上传

baidu_31743955
- 粉丝: 0
- 资源: 5
 我的内容管理
展开
我的内容管理
展开







最新资源
- Hadoop生态系统与MapReduce详解
- MDS系列三相整流桥模块技术规格与特性
- MFC编程:指针与句柄获取全面解析
- LM06:多模4G高速数据模块,支持GSM至TD-LTE
- 使用Gradle与Nexus构建私有仓库
- JAVA编程规范指南:命名规则与文件样式
- EMC VNX5500 存储系统日常维护指南
- 大数据驱动的互联网用户体验深度管理策略
- 改进型Booth算法:32位浮点阵列乘法器的高速设计与算法比较
- H3CNE网络认证重点知识整理
- Linux环境下MongoDB的详细安装教程
- 压缩文法的等价变换与多余规则删除
- BRMS入门指南:JBOSS安装与基础操作详解
- Win7环境下Android开发环境配置全攻略
- SHT10 C语言程序与LCD1602显示实例及精度校准
- 反垃圾邮件技术:现状与前景
