欧拉角与四元数在机器人旋翼飞行器中的应用
欧拉角与四元数
欧拉角(Euler Angle)是描述三维空间中旋转的三个角度,分别是绕x轴、y轴、z轴的旋转角度。四元数(Quaternion)是一种数学对象,用于描述三维空间中的旋转。欧拉角和四元数都是描述三维空间中旋转的方法,但它们有着不同的数学结构和应用场景。
欧拉角是一种描述三维空间中旋转的方法,它由三个角度组成:绕x轴的旋转角度α,绕y轴的旋转角度β,绕z轴的旋转角度γ。欧拉角的计算可以通过矩阵运算来实现,如文章中所示。欧拉角的优点是易于理解和计算,但它存在着一些缺陷,例如当旋转角度很大时,欧拉角的计算将变得非常复杂。
四元数是一种更高级的数学对象,用于描述三维空间中的旋转。四元数由四个分量组成:实部和三个虚部。四元数的计算可以通过矩阵运算来实现,如文章中所示。四元数的优点是可以描述任意的三维空间旋转,并且计算结果是连续的。但是,四元数的计算相对来说更加复杂。
文章中讨论了欧拉角和四元数的关系,通过矩阵运算,文章展示了如何从欧拉角计算四元数,以及如何将四元数转换回欧拉角。文章还讨论了欧拉角和四元数在描述三维空间旋转中的应用场景和优缺点。
欧拉角和四元数都是描述三维空间中旋转的方法,它们各有优缺点。但是,四元数的计算结果更加连续和精确,因此在计算机图形学、机器人学、计算机视觉等领域中得到广泛应用。
知识点:
1. 欧拉角:描述三维空间中旋转的三个角度,分别是绕x轴、y轴、z轴的旋转角度。
2. 四元数:描述三维空间中的旋转的数学对象,由四个分量组成:实部和三个虚部。
3. 欧拉角和四元数的关系:可以通过矩阵运算将欧拉角计算为四元数,也可以将四元数转换回欧拉角。
4. 欧拉角和四元数在描述三维空间旋转中的应用场景和优缺点。
5. 欧拉角的计算:可以通过矩阵运算来实现,如文章中所示。
6. 四元数的计算:可以通过矩阵运算来实现,如文章中所示。
7. 欧拉角和四元数在计算机图形学、机器人学、计算机视觉等领域中的应用。
大话多旋翼飞行器—欧拉角与四元数
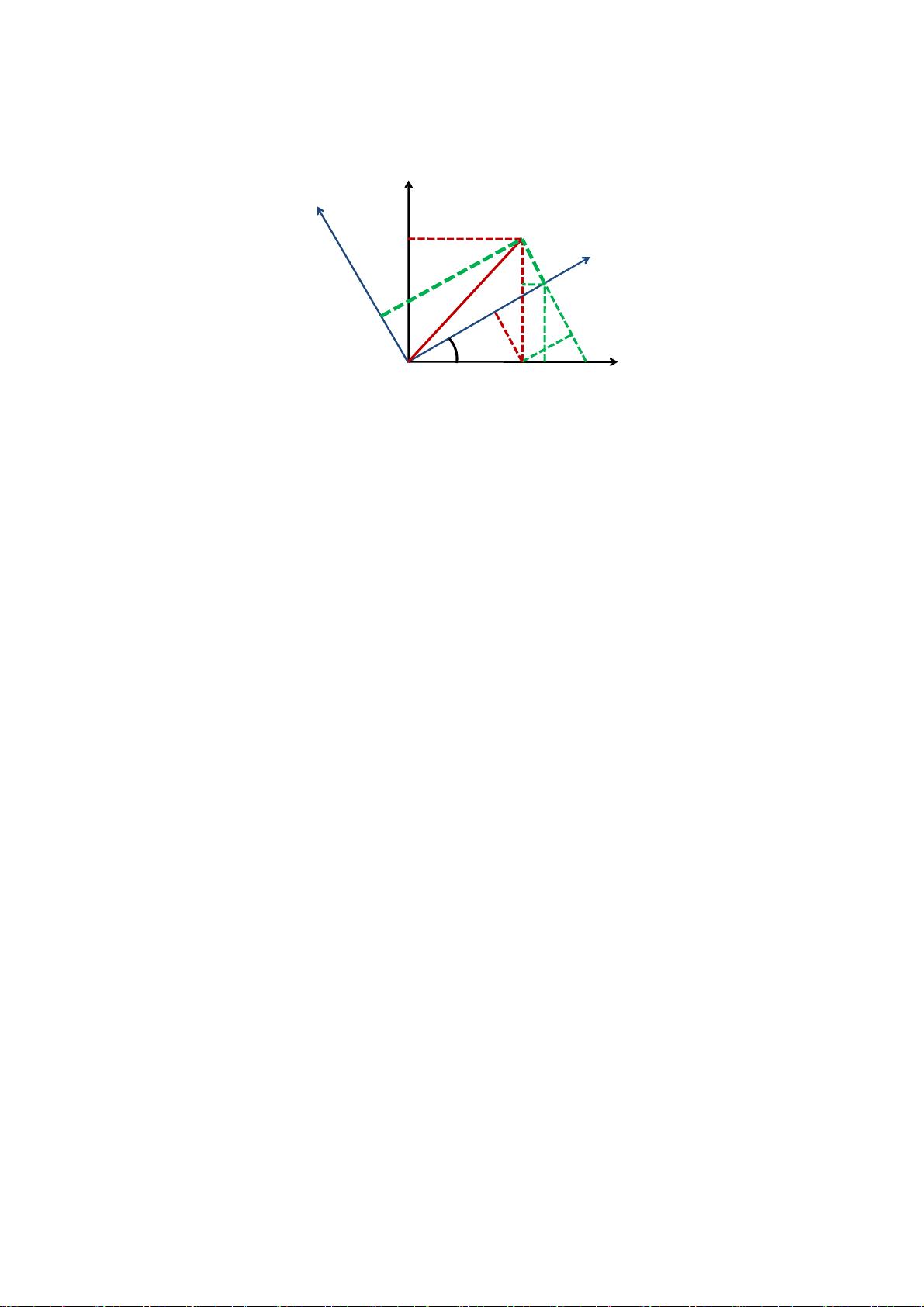
如图所示,假设坐标系从 OXY 绕 Z 轴负方向逆时针旋转 θ 角,变为坐标系 OX’Y’。向量 OA
在 OXY 坐标系下的坐标为(x,y),在 OX’Y’坐标系下的坐标为(x’,y’)。下面计算(x,y)与(x’,y’)
的关系。
''
''
cos sin
sin cos
xx y
yx y
或
'
'
cos sin
sin cos
x
x
y
y
,令
cos sin
sin cos
A
'
'
cos sin
sin cos
xx y
yx y
或
'
'
cos sin
sin cos
x
x
y
y
,令
cos sin
sin cos
B
可以看出 A=B’,互为转置矩阵
推广到 3 维的情况,有
'
'
'
cos sin 0
sin cos 0
001
xx
yy
z
z
和
'
'
'
cos sin 0
sin cos 0
001
xx
yy
z
z
由于是绕
Z
轴旋转,我们给转角加一个下标,表示绕
Z
轴的旋转,即
'
'
'
cos sin 0
sin cos 0
001
zz
zz
xx
yy
z
z
和
'
'
'
cos sin 0
sin cos 0
001
zz
zz
xx
yy
z
z
同理,我们可以得到绕
Y
轴旋转
y
后,两个坐标系下同一个向量的坐标关系
'
'
'
cos 0 sin
010
sin 0 cos
yy
yy
xx
yy
z
z
和
'
'
'
cos 0 sin
01 0
sin 0 cos
yy
yy
xx
yy
z
z
X
Y
X’
Y’
O
A
B
C
B’
C’
r
x
X’
y
y’
下载后可阅读完整内容,剩余8页未读,立即下载
452 浏览量
713 浏览量
点击了解资源详情
842 浏览量
452 浏览量
713 浏览量
220 浏览量
2023-02-20 上传
2023-02-20 上传

可爱的芒果酱
- 粉丝: 48
- 资源: 18
 我的内容管理
展开
我的内容管理
展开







最新资源
- 数据结构(c++版)
- Keil C51使用详解
- 3D论文-A Generic Framework for Efficient 2-D and 3-D Facial Expression Analogy
- 楼房销售论文.doc
- WebLogic Web Development
- The C Programming Language
- 一个RMI的分布式应用的实例
- 很好看的一个js的小日历
- Turbo C 屏幕函数
- ArcGIS9.3新特性
- CHD372中文资料
- C语言100例(精髓)
- 附录B Phase1-Phase2-Phase2+之间的差异
- ext中文手册(ext教程)
- 常用功能的测试方法-告诉你如何测试界面、功能、安装测试等
- 跟我一起写Makefile
