单目视觉下运动目标跟踪定位:Hough变换与卡尔曼滤波结合
需积分: 9 23 浏览量
更新于2024-08-11
收藏 1.11MB PDF 举报
本文档探讨的是"基于单目视觉的运动目标跟踪定位"这一主题,发表于2010年的《四川兵器学报》第31卷第4期。该研究旨在介绍单目视觉跟踪定位系统的理论基础和实际应用。系统的核心原理是利用Hough变换来提取运动目标的特征圆,这是一种用于检测圆形物体的图像处理技术,有助于识别和定位目标。
系统的关键组成部分包括视频采集设备(摄像机)以及一套专门设计的跟踪算法,这个算法结合了邻域线性搜索与卡尔曼滤波器。邻域线性搜索是一种局部搜索策略,有助于减少在追踪过程中对目标位置的预测搜索所需的时间,提高计算效率。卡尔曼滤波器则是一种用于估计动态系统状态的优化算法,通过连续的数据融合,能够减小噪声干扰并提供更精确的目标位置估计,防止因目标快速移动导致的跟踪丢失。
作者孙彪,作为一名硕士研究生,专注于图像测量领域的研究,他的工作着重于解决单目视觉系统中的实时性和准确性问题。计算机视觉作为一门交叉学科,其目标是模仿人眼的视觉功能,通过图像处理和机器学习技术解析和理解图像信息。运动目标跟踪定位作为计算机视觉的一个重要分支,其应用广泛,尤其是在需要实时处理大量图像数据的场景中,如机器人导航、自动驾驶等。
本文还提到了多目视觉和双目视觉跟踪定位方法的局限性,如视野受限、立体匹配复杂和系统复杂度高等,这些因素促使单目视觉因其结构简单和标定方便的优势在某些领域逐渐占据主导地位。实验部分展示了作者的跟踪定位算法在实际操作中的效果,通过实验验证和结果展示,证明了这种方法在提高跟踪精度和降低系统复杂度方面的有效性,具有很高的实用价值。
总结来说,这篇文章深入研究了单目视觉技术在运动目标跟踪定位中的应用,强调了算法的创新设计及其在提升系统性能方面的作用,为单目视觉技术在计算机视觉领域的发展提供了新的思路和实践经验。
第 31卷 第 4期 四 川 兵 工 学 报 2010年 4
月
收稿日期:2010-01-29
基金项目:山西省自然科学基金资助项目(2007012003)。
作者简介:孙彪(1984—),男,硕士研究生,主要从事图像测量研究。
【信息与计算机】
基于单目视觉的运动目标跟踪定位
孙 彪
(中北大学 现代无损检测中心,太原 030051)
摘要:介绍了单目视觉跟踪定位系统的原理、组成,采用 Hough变换提取运动目标的特征圆进行检测,基于邻域
线性搜索与卡尔曼滤波器相结合的跟踪算法,准确实现运动目标的跟踪定位和运动轨迹的三维重建,并进行了
相应的实验验证分析,给出了最终的实验结果。
关键词:单目视觉;跟踪;定位;Hough变换;卡尔曼滤波器
中图分类号:TP392.6 文献标识码:A 文章编号:1006-0707(2010)04-0085-05
计算机视觉是计算机科学和人工智能的一个重要分
支,它既是工程领域,也是科学领域中的一个富有挑战性
的重要研究领域,已经吸引了来自各个学科的研究者参加
到对它的研究之中。计算机视觉研究的主要内容是通过
各种成像系统代替视觉器官作为信号输入手段,由计算机
来代替大脑完成对信息的处理和理解
[1-4]
。运动目标跟
踪定位作为计算机视觉中的一个重要领域已经成为目前
研究的热点问题,它通过视觉传感器对运动目标连续运动
的图像序列的采集,从图像序列中对运动目标进行检测、
跟踪、定位,最终实现对运动目标行为的描述和理解。
目前的计算机视觉跟踪定位主要有多目视觉传感器
跟踪定位、双目视觉跟踪定位和单目视觉跟踪定位,但由
于利用多目视觉传感器和双目视觉跟踪定位中存在着视
场小、立体匹配难、系统结构庞大等缺陷,在很多场合已逐
渐被结构简单、标定步骤少的单目视觉所代替。本实验中
通过单目视觉实现了对运动目标的跟踪定位,设计了基于
邻域线性搜索与卡尔曼滤波器相结合的跟踪算法,有效地
减少了传统的跟踪算法对目标位置预测搜索的迭代时间,
解决了在相邻帧图像中由于目标位置发生剧烈变化而容
易出现目标丢失的问题,系统简单便携,具有较高的应用
价值。
1 单目视觉跟踪定位系统
单目视觉跟踪定位系统主要通过一台摄像机对运动
目标进行连续的图像序列的采集,应用设计好的算法在图
像序列中对目标进行检测、跟踪、定位,并将运动目标的运
动轨迹进行重建,对每时刻目标的三维空间位置坐标结果
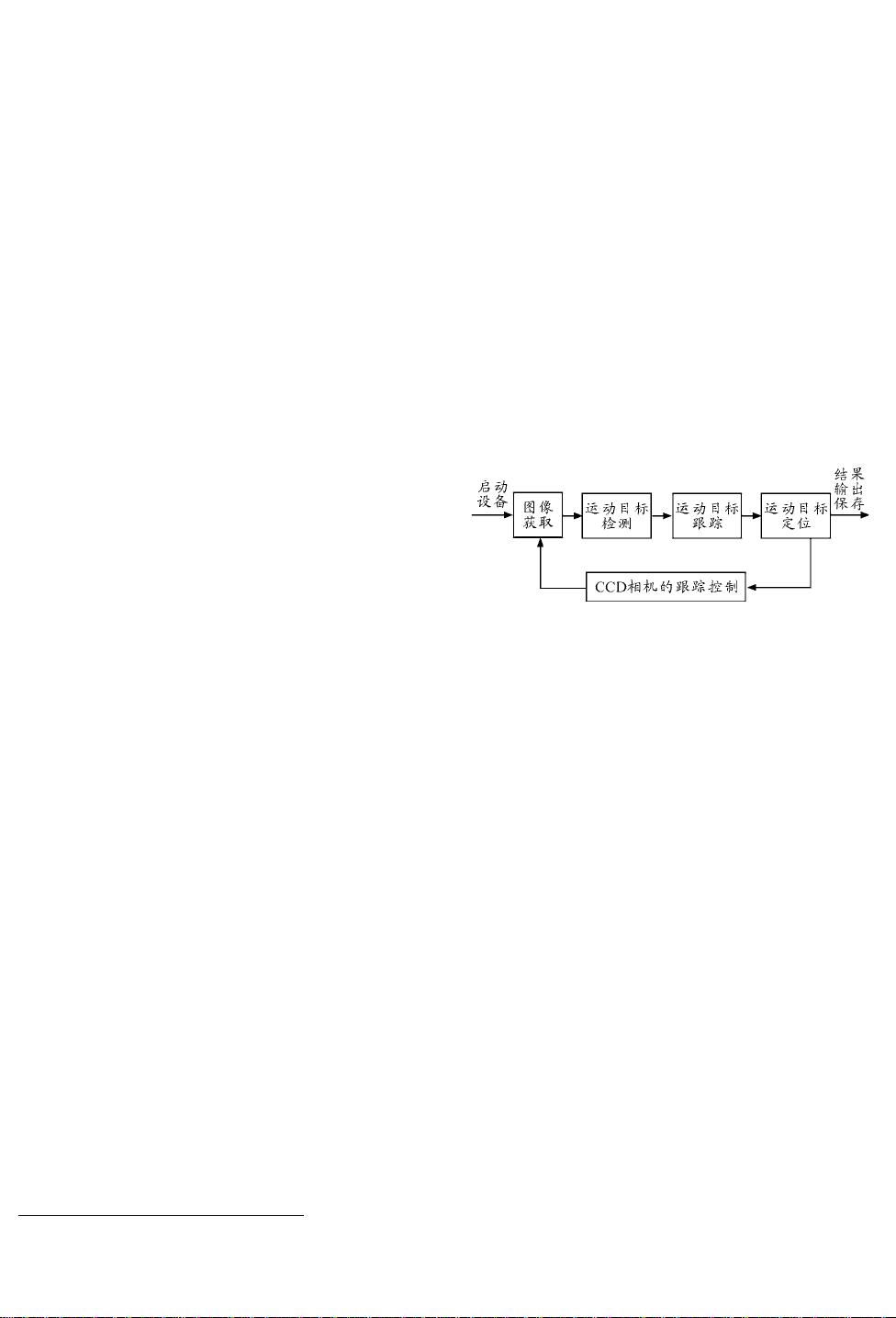
输出保存。系统原理框图如图 1所示。
图 1 单目视觉跟踪定位系统原理
由于要对运动目标进行精确的跟踪定位,所以在试验
前要对摄像机的内参数进行标定测量,因此单目跟踪定位
系统主要包括摄像机标定、运动目标检测、运动目标跟踪、
运动目标定位 4个部分。
1.1 摄像机标定
摄像机标定是通过摄像机获取物体的一系列二维像
片来确定摄像机内外参数,解决三维物点与二维像点的对
应关系问题,它是计算机视觉领域里从二维图像提取三维
空间信息必不可少的关键一步。
目前,摄像机标定方法根据标定方式的不同,主要可
以归结为以下 2种:传统的标定方法和自标定方法。传统
的摄像机标定方法是指用一个结构已知、精度很高的标定
块作为空间参照物,通过空间点和图像点之间的对应关系
来建立摄像机模型参数的约束,然后通过参数估计来求得
这些参数。传统的方法典型代表有 DLT方法(directlinear
transformation)、考虑畸变补偿的两步法,以及简易标定方
法。传统的标定方法的优点在于可以获得较高的精度,但
它是一种静止的标定方法,且标定过程费时费力,在实际
应用中比较有局限。自标定方法 (selfcalibration)是指直
接由未标定的 2幅或多幅图像来确定摄像机参数的过程,
它克服了传统方法的缺点,不需要标定块,仅仅依靠多幅
图像对应点之间的关系进行标定,但它一般没有考虑摄像
下载后可阅读完整内容,剩余4页未读,立即下载
2017-03-14 上传
2021-06-28 上传
2020-05-18 上传
点击了解资源详情
787 浏览量
446 浏览量
643 浏览量
点击了解资源详情
点击了解资源详情

weixin_38722588
- 粉丝: 6
- 资源: 839
 我的内容管理
展开
我的内容管理
展开







最新资源
- NIST REFPROP问题反馈与解决方案存储库
- 掌握LeetCode习题的系统开源答案
- ctop:实现汉字按首字母拼音分类排序的PHP工具
- 微信小程序课程学习——投资融资类产品说明
- Matlab犯罪模拟器开发:探索《当蛮力失败》犯罪惩罚模型
- Java网上招聘系统实战项目源码及部署教程
- OneSky APIPHP5库:PHP5.1及以上版本的API集成
- 实时监控MySQL导入进度的bash脚本技巧
- 使用MATLAB开发交流电压脉冲生成控制系统
- ESP32安全OTA更新:原生API与WebSocket加密传输
- Sonic-Sharp: 基于《刺猬索尼克》的开源C#游戏引擎
- Java文章发布系统源码及部署教程
- CQUPT Python课程代码资源完整分享
- 易语言实现获取目录尺寸的Scripting.FileSystemObject对象方法
- Excel宾果卡生成器:自定义和打印多张卡片
- 使用HALCON实现图像二维码自动读取与解码
