OpenMV巡线模块详解:直线、直角与T/十字路口检测
OpenMV巡线模块原理讲解是一份针对OpenMV平台的教程,由凡哥@杭州云江科技撰写,于2018年4月3日更新。这份文档详细介绍了如何利用OpenMV进行智能路线导航,特别是针对直线、直角、T形和十字路口的识别。OpenMV是一款基于微控制器的开源计算机视觉模块,它结合飞控系统能实现在无人机或机器人中的自主路径追踪。
该教程的核心原理是将摄像头捕获的画面分割成五个关键区域:上部横向采样(up)、中部横向采样(middle)、下部横向采样(down)、左侧垂直采样(left)和右侧垂直采样(right)。这些ROI(Region of Interest,感兴趣区域)用于分析图像中色块的变化,从而判断行驶路径。
直线巡线通过检测这些区域的色块变化来确定车辆是否保持在直线上。直角转弯则依据左右两侧ROI区域的色块状态来判断转向方向,如左转或右转。T字形路口的判定更为复杂,需要同时考虑is_turn_right和is_turn_left的信号来确定方向,而十字路口的情况更为特殊,因为没有预设的方向,圆心坐标(cx, cy)在这种情况下才有意义。
计算交叉点的圆心坐标依赖于ROI区域内的色块计数,只有在检测到十字形或T字形时才进行计算。cx和cy分别表示交叉点的中心x和y坐标,它们是基于多个ROI区域的平均值得出的。在直线行驶时,参数cmean_x具有特定含义,它代表的是画面中心的x坐标。
通过这种算法,OpenMV能够实时处理复杂的道路环境,提供悬停定位参考,尤其是在四轴飞行器悬停时,有助于实现更精准的控制。然而,由于圆形识别的计算成本和稳定性问题,当角度变化过大时,这种方法可能不再适用。
OpenMV巡线模块原理讲解不仅包含了基础的图像处理技术,还涉及到了机器视觉、路径规划和实时决策,适合对OpenMV平台有深入理解和编程能力的开发者学习和实践。通过学习和理解这些原理,用户可以在实际项目中更好地利用OpenMV进行自主导航和避障。
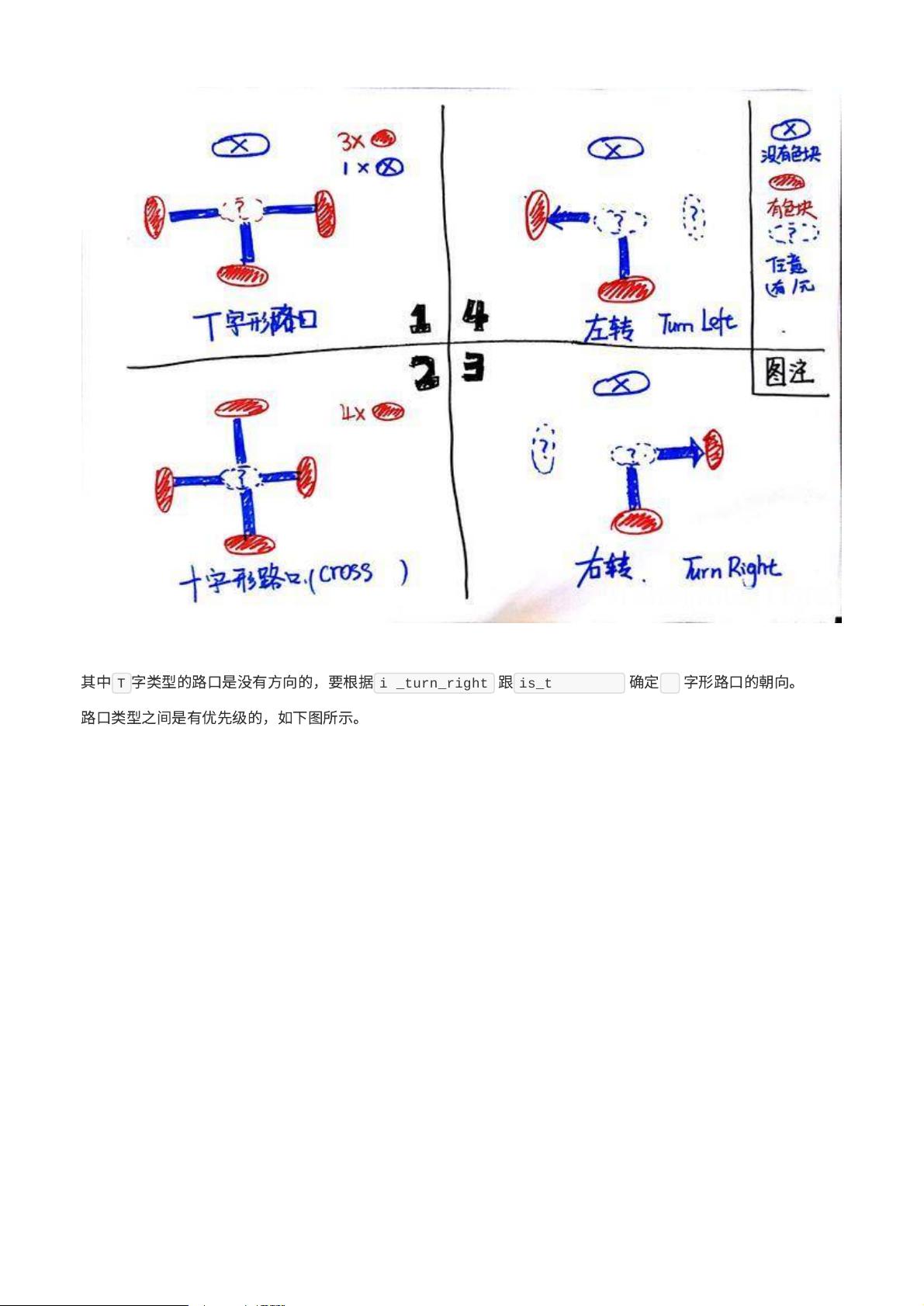
其
中
T
字
类
型
的
路
⼝
是
没
有
⽅
向
的
,
要
根
据
is_turn_right
跟
is_turn_left
确
定
T
字
形
路
⼝
的
朝
向
。
路
⼝
类
型
之
间
是
有
优
先
级
的
,
如
下
图
所
⽰
。
剩余10页未读,继续阅读
2023-06-08 上传
2023-07-13 上传
2024-11-02 上传
2023-08-03 上传
2024-11-02 上传
2023-06-08 上传

带火星的小木头
- 粉丝: 245
- 资源: 22
 我的内容管理
展开
我的内容管理
展开







最新资源
- Spring+SpringMVC用户角色管理系统.zip
- python实例-03 幸运大转盘.zip源码python项目实例源码打包下载
- RobinASR:ROBIN项目中的罗马尼亚语自动语音识别
- A4WD四轮驱动机器人,基于Arduino设计-电路方案
- zepto-dragswap:一个具有可交换可拖动可排序列表和网格的微型插件
- ObjectExplorer4J-开源
- 电子功用-基于超声波电机的高精度小型化光纤陀螺寻北仪转位机构
- SistemaGageCapelo
- 基于ESP8266的WIFI 红外遥控DIY制作(原理图、PCB、bom、源码、APK等)-电路方案
- alpha-shape:任何维度的 alpha 形状
- 电子功用-基于库尔特原理的电阻脉冲式生物芯片检测装置
- bunkerlay:多个项目的Gentoo叠加
- tools:Kyump在许多项目中使用的工具
- NestJS-Angular
- (分享)履带机器人移动平台+安装说明-电路方案
- 自动化
