FANUC机器人与S7-1200 Profinet全面指南:PLC配置与通信步骤详解
版权申诉
本文档详细介绍了FANUC机器人与西门子S7-1200 Profinet通讯的过程,这是一种工业自动化领域的关键连接技术,用于实现PLC(可编程逻辑控制器)与机器人之间的高效通信。以下是从文件中提炼出的核心知识点:
1. PLC组态:
- 在开始通信前,首先需要在PLC上进行配置,包括新建项目,添加新设备,并确保选择的CPU类型与实际硬件版本匹配。
- 设置以太网地址和IP协议,确保它们在同一个网络段内,以便数据传输。
2. 添加机器人设备:
- 在设备和网络视图中,需要安装FANUC机器人的GSD文件,并将其添加到Profinet网络中,指定特定的硬件如R-30Ib EF2 AO5B-2600-R843和Robot Controller。
3. 网络配置:
- 创建新的子网并分配给机器人设备,接着将PLC与机器人通过Port1(通常是第二个网口)连接起来。
4. IP地址设置:
- 在机器人上设置Profinet IP地址,确保与PLC上的设置保持一致,这通常在示教器的I/O设置中完成。
5. I/O配置:
- 配置输入和输出插槽的字节数,根据项目需求决定PLC与机器人之间通信的数据范围,例如DI1-D12和DI511-D512。
6. 编译与下载:
- 对组态好的项目进行编译,然后通过PG/PC工具下载到PLC,确保计算机的网卡设置正确。
7. 测试与验证:
- 下载完成后,通过测试机器人DI通道来确认通信是否正常,如DI1-D12前2位和DI511-D512后2位的I/O读写是否无误。
这些步骤是基于西门子S7-1200 Profinet标准进行的,旨在确保FANUC机器人能够无缝地与西门子PLC集成,实现自动化生产线的数据交换,提高生产效率和灵活性。对于任何从事自动化控制或智能制造的工程师来说,理解和掌握这种通信方法至关重要。
FANUC 机器人与西门子 S7-1200 Profinet 通讯
4
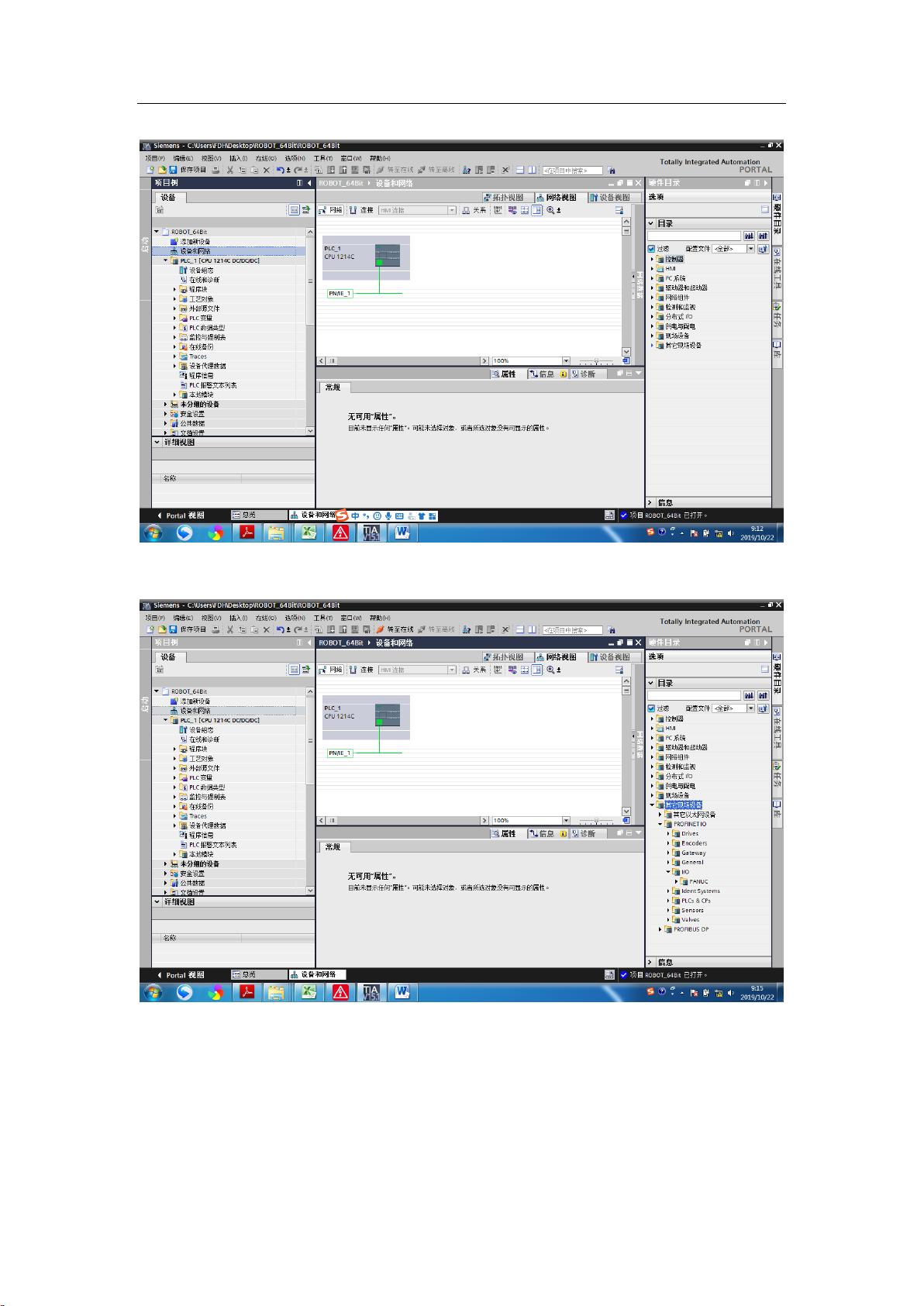
7. 设备和网络
8. 添加机器人(需要先安装好 FANUC 机器人 GSD 文件)
9. 选择 硬件目录下 → 其他现场设备 → PROFINET IO → I/O → FANUC →R-30Ib EF2
→AO5B-2600-R843;FANUC Robot Controller(1.0)
剩余19页未读,继续阅读
390 浏览量
232 浏览量
110 浏览量
153 浏览量
234 浏览量
153 浏览量
234 浏览量
点击了解资源详情
2880 浏览量









