FANUC机器人与S7-1200 PLC Profinet通讯配置指南
需积分: 5 158 浏览量
更新于2024-06-18
收藏 5.23MB PDF 举报
"该文档详细介绍了如何配置FANUC机器人与西门子S7-1200 PLC通过Profinet进行通信,并设置了外部启动功能。"
本文档主要阐述了如何实现FANUC机器人与西门子S7-1200 PLC之间的Profinet通讯配置,以及外部启动的设定步骤。以下是详细的步骤解析:
1. **PLC组态**:
- 首先,需要在SIMATIC Manager中新建一个项目。
- 接着,添加新的设备,选择对应的S7-1200 CPU型号,确保版本号与实际硬件一致。
- 设置PLC的以太网地址,确保它与FANUC机器人的IP地址处于同一网段。
2. **配置网络**:
- 添加新的子网,以便让PLC和机器人位于同一个Profinet网络中。
- 配置IP协议,设定PLC的IP地址,确保与机器人IP在同一网段。
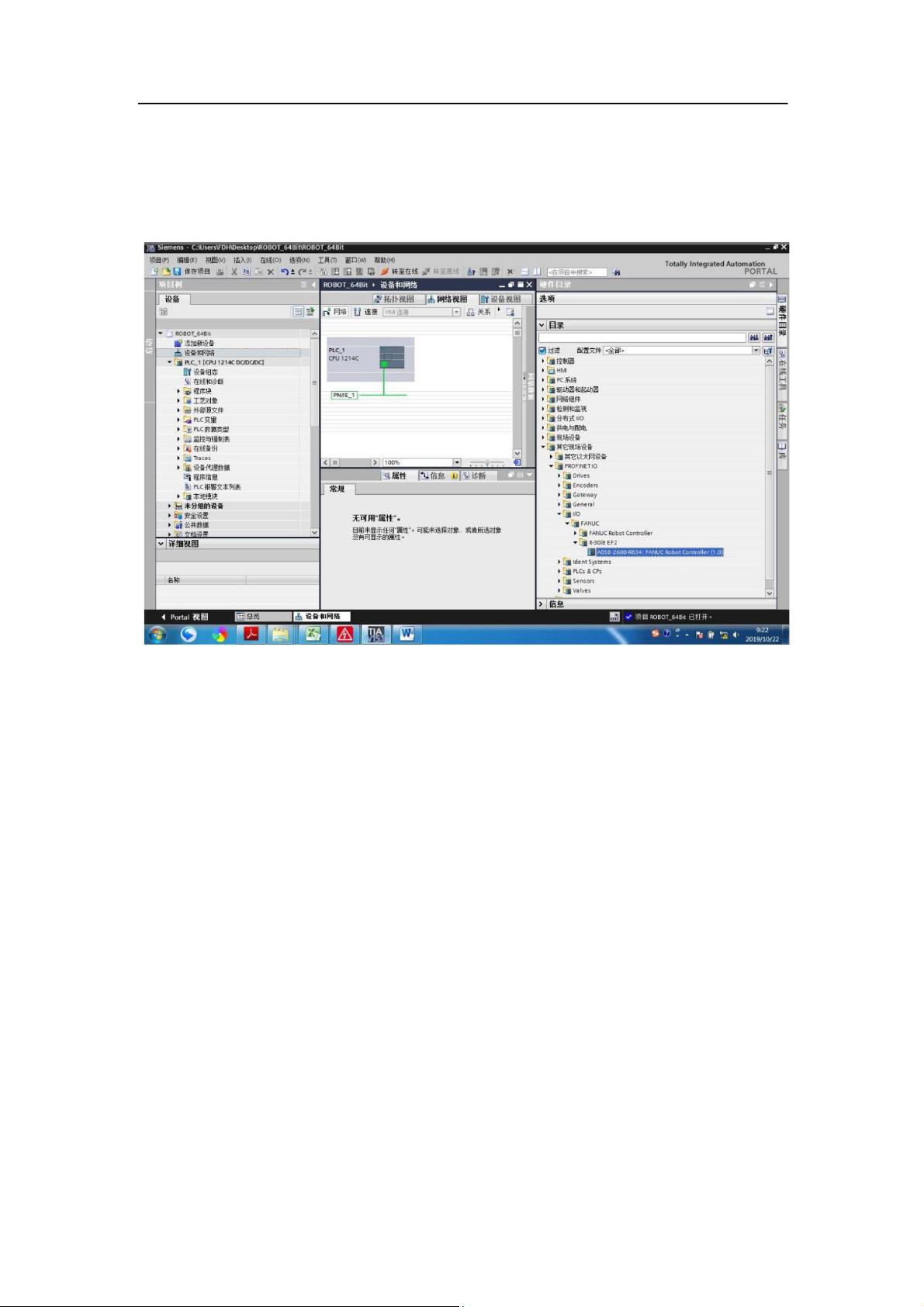
3. **添加机器人设备**:
- 安装FANUC机器人GSD文件,这是为了使SIMATIC Manager识别FANUC机器人作为Profinet设备。
- 在硬件目录下选择“其他现场设备” -> “PROFINET IO” -> “I/O” -> “FANUC” -> “R-30IbEF2” -> “AO5B-2600-R843;FANUC Robot Controller (1.0)”,将FANUC机器人添加至网络中。
4. **设置设备属性**:
- 在设备视图中,双击“r30ib-iodevice”(机器人图标),配置机器人的IP地址,使其与实际设置保持一致。
- 根据项目需求,设置通讯I/O的字节数,这将决定PLC与机器人的数据交换范围。
- 分别定义PLC输入I和输出Q的首地址,这些地址将用于PLC向机器人发送和接收信号。
5. **网络拓扑连接**:
- 转至拓扑视图,连接PLC到机器人,确保选择正确的端口,通常是机器人的Port1(第二个网口)。
6. **程序编译与下载**:
- 对编程完成的项目进行编译,检查无误后进行下载。
- 在下载过程中,PG/PC接口应设置为与计算机的网卡对应,以确保程序能正确传输到PLC。
7. **外部启动配置**:
- 虽然文档未详细说明外部启动的配置步骤,但通常需要在PLC程序中设定特定的启动条件,例如通过一个输入信号触发机器人的运行。
通过以上步骤,可以成功配置FANUC机器人与S7-1200 PLC之间的Profinet通信,实现两者间的高效数据交换和控制指令传递。此配置对于实现自动化生产线上的精确运动控制和实时数据交换至关重要。
FANUC 机器人与西门子 S7-1200 Profinet 通讯
9. 选择 硬件目录下 → 其他现场设备 → PROFINET IO → I/O → FANUC →R-30Ib EF2
→AO5B-2600-R843;FANUC Robot Controller(1.0)
10. 组网
6
剩余28页未读,继续阅读
2206 浏览量
572 浏览量
389 浏览量
231 浏览量
110 浏览量
572 浏览量
152 浏览量
152 浏览量
2571 浏览量


晚ovo安
- 粉丝: 1
- 资源: 29
 我的内容管理
展开
我的内容管理
展开







