"低成本可视觉检测和语音控制的轻型智能机器狗研发"
需积分: 0 48 浏览量
更新于2024-01-30
收藏 574KB DOCX 举报
轻型智能化仿生机器人的研发项目旨在打造一款低成本、具有运动、视觉、语音回复和表情等功能的机器狗。项目的核心技术包括实现搭载视觉与语音控制的精准步态规划和控制,以及适应各种地形的能力。该项目的主要程序是run_robot.py,通过操纵杆接口、控制器和硬件接口协调机器狗的行为。视觉信息处理采用picamera和UDP传输,通过预训练好的人脸识别模型检测场地中的人脸信息。这一项目的创新之处在于其低成本、具有视觉检测和语音控制功能的机器狗,以及其适应性强、轻量且小型的设计。机械设计采用了简单的连杆机构和轻便、高韧性的碳纤维材料。团队在项目设计过程中遇到了一些困难,但通过协作、明确的分工和个人专业实力的提升克服了这些问题。
项目背景
现状分析:在工业生产及环境的管控中,监测起着十分重要的作用。然而,目前市面上的工厂自动化产品,尤其是固定摄像头,存在视觉盲区的问题,无法全面地对环境进行360度监测。在家庭教育和娱乐领域,现有的智能玩具或机器人产品功能单一,交互性不强。
项目目标:在这一背景下,该项目旨在研发一款具有视觉和语音控制功能的低成本机器狗,以解决工厂自动化和家庭娱乐领域的问题。这款机器狗将具有较强的适应性,可以适应各种地形,并可以通过视觉和语音与用户进行交互,为工业生产和家庭教育带来更多便利。
关键技术
该项目的关键技术包括精准步态规划和控制,以及地形适应能力。通过实现搭载视觉与语音控制的精准步态规划和控制,机器狗可以实现更加灵活的运动。同时,具备优良适应性的地形适应能力,可以使机器狗在不同地形上行动自如,扩大了适用范围。
创新点和特色
该项目的创新点和特色主要体现在几个方面。首先,具有可视觉检测和语音控制的低成本机器狗,满足了市场对于多功能机器狗的需求。其次,机器狗具有适应性强的轻量、小型桌面级设计,可以适用于不同场景,包括工业和家庭领域。此外,机械设计采用了简单的连杆机构和轻便、高韧性的碳纤维材料,使得机器狗在运动过程中更加灵活和耐用。
技术实现
项目的主程序run_robot.py,通过操纵杆接口、控制器和硬件接口协调机器狗的行为。在视觉信息处理方面,采用了picamera和UDP传输,实现了图像数据的实时传输,并通过预训练好的人脸识别模型检测进入场地的人脸信息。
团队合作与突破
在项目设计和研发过程中,团队遇到了一些困难。然而,团队成员通过协作、分工明确和个人专业实力的提升,成功克服了这些问题,取得了较好的成果。团队合作的重要性得到了充分体现,每位成员在各自的领域中发挥了积极的作用,促进了项目的顺利进行和取得较好的成果。
未来展望
随着智能技术的不断进步,轻型智能化仿生机器人将会在工业生产和家庭教育领域发挥更加重要的作用。未来,我们将继续完善机器狗的功能,提升其在视觉和语音识别方面的性能,以满足不断增长的市场需求。同时,我们也会继续探索新的材料和技术,使机器狗在运动灵活性和耐用性上取得更大突破,为用户带来更好的体验和便利。
环境中,这些产品往往无法灵活应对障碍物或执行精准的动作。相比之下,我们的产品注重创
新和技术突破,通过先进的运动控制算法和传感技术,实现更灵活、精确的行走和操作能力。
3. 隐私保护不足:
市场上的四足机器狗通常采用摄像头作为主要的数据输入设备,这可能引发用户对隐私的担忧
。同时,摄像头本身的能耗较高,与机器狗的能效目标存在冲突。我们的产品采用了更准确、
低能耗的数据采集和处理方式,充分保护用户的隐私,并提供更高的能效性能
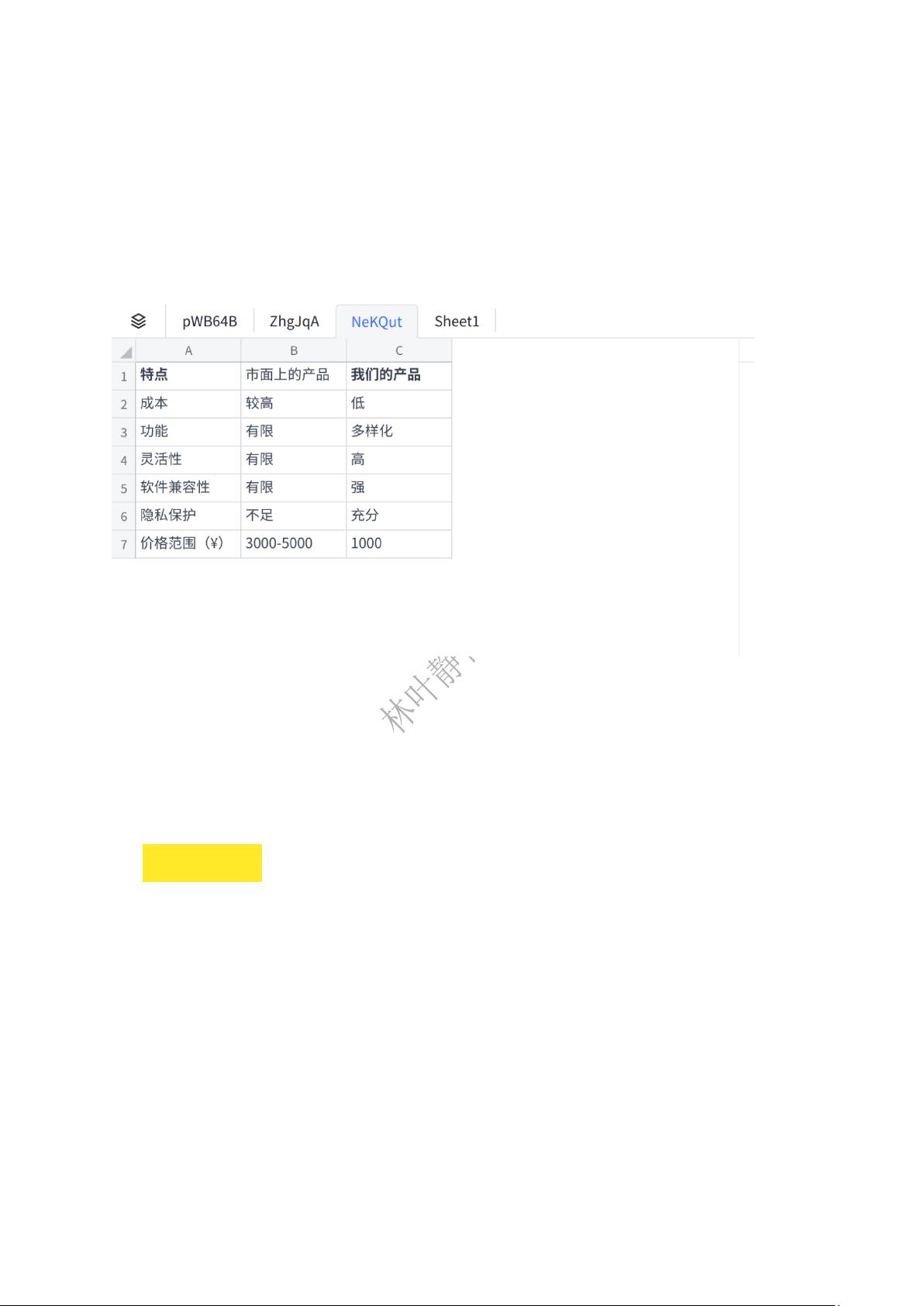
点击图片可查看完整电子表格
通过对比数据,可以清楚地看到我们的四足机器狗产品在成本和功能等方面具备显著优势。我
们的产品价格范围更为亲民,使更多消费者能够承担得起,并且提供更多样化的功能,具备更
高的灵活性和强大的软件兼容性。同时,我们注重隐私保护,为用户提供更加安全的使用体验
。
4. 产品技术
面对当前市场的挑战,我们成功研发出一款引领行业的四足机器狗,采用了一系列厉害的高精
尖新技术。我们对产品性能进行了专门的设计和优化,实现了高度灵活性、集成性以及出色软
件兼容性,引领行业发展的潮流。
1. 感知与决策:我们的四足机器狗采用了先进的感知与决策技术,搭载了高精度的传感
器套件。通过视觉、声音和触觉传感器,机器狗能够实时感知周围环境,并将数据传输至智能
决策系统。这个系统利用深度学习算法和强化学习模型进行环境分析和决策制定,使机器狗能
够智能地应对各种复杂情况和任务。
2. 运动控制与稳定性:为了实现高度灵活性和稳定的运动,我们采用了先进的运动控制
与稳定性技术。机器狗的关节结构设计经过优化,结合先进的控制算法,能够实现精确而平稳
剩余18页未读,继续阅读
2022-02-11 上传
2022-11-28 上传
2023-09-30 上传
2023-09-20 上传


2301_76888791
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







