贝叶斯非局部方法提升3D徒手超声重建精度
需积分: 10 103 浏览量
更新于2024-07-10
1
收藏 9.82MB PDF 举报
本文主要探讨了一种创新的基于贝叶斯理论的3D徒手超声非局部重建方法,该方法针对临床实践中存在的不规则间隔B扫描的手绘3D超声成像,旨在提高图像的精确体积重建质量。传统的3D超声成像在计算机辅助诊断和图像引导治疗中发挥着关键作用,然而,如何有效地处理图像中的斑点噪声和缺失数据是一个挑战。
研究者提出了一种结合变分重构的非局部方法,其中噪声抑制是通过非局部总方差滤波技术实现的。这种方法首先通过改进的非局部降噪策略,利用高斯权重函数替代传统的Pearson距离权重,更好地适应超声图像中常见的斑点噪声特性。斑点噪声的减少不仅依赖于优化的权重函数,还通过基于非局部均值滤波器的新型修复方案来完成。这一方案引入了快速行进方法,能够更准确地填充图像中的空白区域,提高数据插值的效率和精度。
皮尔逊距离函数在贝叶斯估计中起到了关键作用,不仅用于噪声去除,还在非局部均值滤波器的构建中提供了重要的统计依据。通过这种方法,算法能够兼顾斑点抑制和边缘保持,这对于保证图像细节的清晰度至关重要。
为了验证新方法的有效性,研究者进行了实际实验,包括对人体立方体数据、体外超声腹部模型以及体内肝脏的3D重建。实验结果表明,相比于经典算法和最新的超声图像处理技术,该基于贝叶斯的非局部方法在斑点抑制和边缘保留方面表现优秀,从而显著提升了3D超声成像的质量,对于提升临床诊断的准确性具有重要意义。
总结来说,这项工作是一项创新性的贡献,它将贝叶斯统计学与非局部技术相结合,为解决3D徒手超声成像中的噪声和缺失数据问题提供了一种高效且精确的方法,有望推动该领域的进一步发展。
voxel and fills any remaining empty vox els. A variety of BFS and HFS
methods hav e been reported. In [17] and [1 8 ],amethodnamedpixel
nearest neighbor (PNN) is proposed. The algorit hm runs through each
pixel and assigns the pixel value into the nearest vo x el. Av eraging is
performed for multiple contributions to the same vo x el, but different
variants are possible, like the most recent value [1 9],thefirst value
[20] or the keeping the maximum value [17]. Instead of assigning the
pixel value to one voxel, the pixel value can spread among a local
neighborhood based on a kernel function. The kernel-based algorithm
uses a kernel around each pixel. A weighting function based on the
distance between current pixel and the target vo x el is used to weight
the contribution of the pixel val ue on the nearby vox e ls. Various
kernel functions have been reported for the BFS purpose, including
the ellipsoid truncated Gaussian kernel with Gaussian weighting [19],
the ellipsoid Gaussian kernel with exponential weighting [21],the
fix ed cubic kernel with linear weighting [22].Toperformthe3D
reconstruction with sparse ra w data, the three-order Bezier curves are
employed for approximating the voxels located in a 4 B-scans control
windows in the BFS in [23].
After BFS, there are usually gaps in the resulting volume,
especially if the scanned dataset is sparse. In the HFS, the
reconstructed volume is traversed and each empty voxel is
estimated with the information from the nearby filled voxels. A
variety of methods have been presented for this purpose, including
the averaging [24,25] or a median [26] of the filled voxels in a local
neighborhood, the interpolation between the two closest non-
empty voxels [27].In[28], an adaptive Gaussian kernel is intro-
duced into the HFS. Each bin-filled voxel is applied to the
neighboring voxels based on a spherical Gaussian kernel. The
variance of the kernel depends on the variance of the intensity of
the nearby bin-filled voxels. In [29], a pre-computed Gaussian
kernel is used to speed up the interpolation process. The algorit-
hm uses the graphics processing unit (GPU) to implement the
time-consuming reconstruction algorithm and the incremental
rendering computations. In [30], a reconstruction algorithm based
on fast marching method (FMM) is proposed. Instead of the linear
traversing in the conventional HFS, the algorithm advances the
interpolation boundary along its normal direction and fills the area
closest to known voxel points in first with the direction-weighted
interpolation scheme.
PBMs are one of the most popular reconstruction methods for
its high computation speed and low memory requirement. They
can provide physician a visible 3D dataset within a few seconds
after acquisition. However, obvious artifacts can be generated on
the boundaries between the highly detailed bin-filled region and
the smoothed hole-fi lled region [3]. Meanwhile, most hole-
filling
methods have a limit on how far from away from known voxels
the holes are filled. If the B-scan slices have not been scanned with
dense sampling or the hole-filling neighborhood is too small, there
will still be holes in the reconstructed volume [4].
2.3. Function-based reconstruction method
FBMs are another important means for voxel array creation.
They choose a particular function (e.g. a polynomial) and deter-
mine coefficients to make it pass through the input pixels. Then
the resulting volume can be created by evaluating the function at
the regular voxel grid. In [31], a method named radial basis
function (RBF) method is introduced. In the algorithm, an RBF is
used to create the spline approximation function for the under-
lying shape of the reconstructed volume data. Disadvantages for
the RBF interpolation method come from the existence of over-
fitting, especially for the ultrasound image data corrupted with
speckle noise. In [32], a statistical method named Rayleigh
reconstruction/interpolation with a Bayesian framework is pro-
posed. The algorithm uses the Rayleigh distribution to describe the
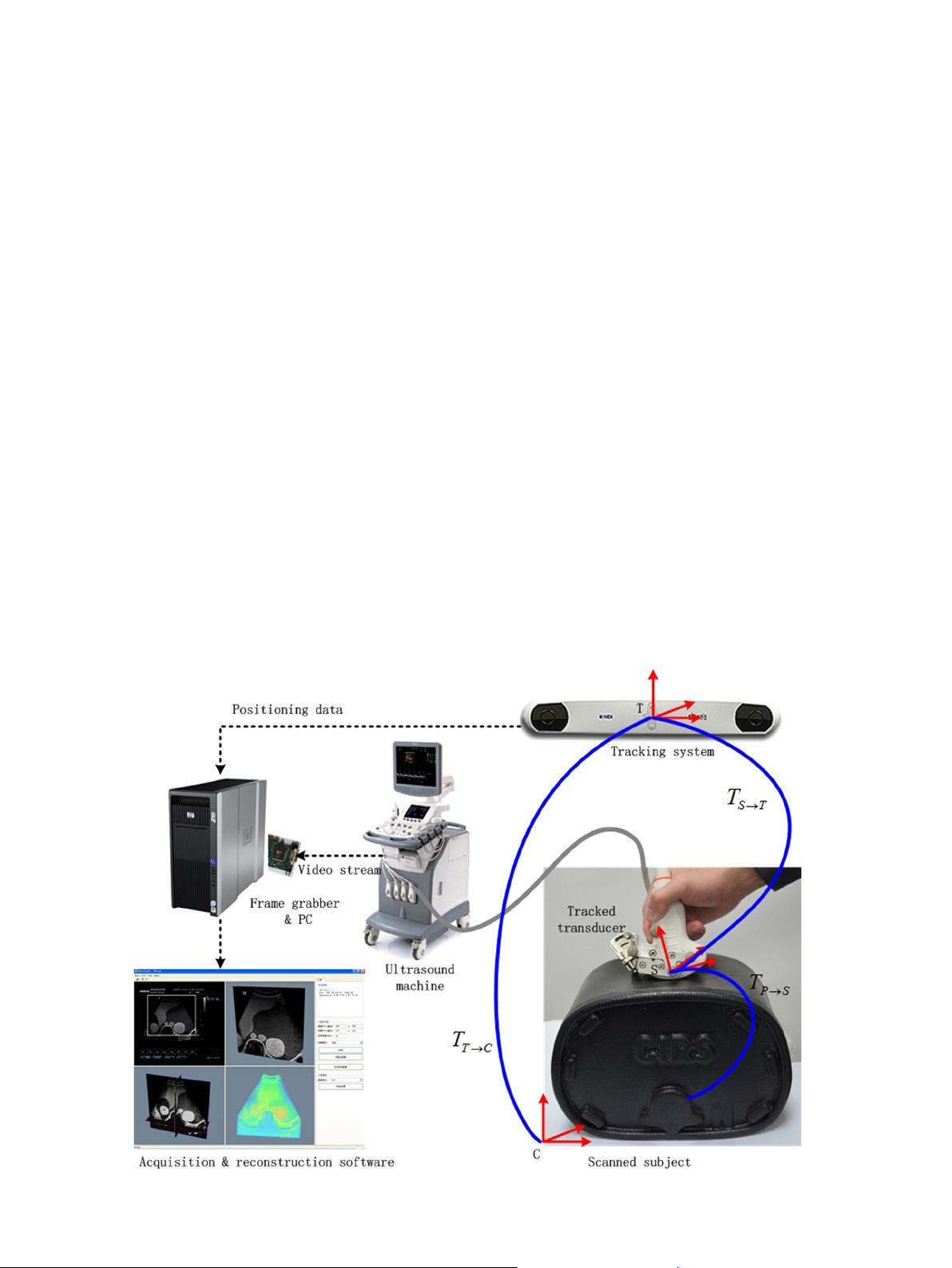
Fig. 1. The configuration for our freehand 3D ultrasound imaging system.
T. Wen et al. / Neurocomputing 168 (2015) 104–118106
剩余14页未读,继续阅读
2023-05-28 上传
2023-03-28 上传
2024-11-02 上传
2023-07-12 上传
2024-01-27 上传
2023-07-27 上传

weixin_38618540
- 粉丝: 3
- 资源: 943
 我的内容管理
展开
我的内容管理
展开







最新资源
- C语言数组操作:高度检查器编程实践
- 基于Swift开发的嘉定单车LBS iOS应用项目解析
- 钗头凤声乐表演的二度创作分析报告
- 分布式数据库特训营全套教程资料
- JavaScript开发者Robert Bindar的博客平台
- MATLAB投影寻踪代码教程及文件解压缩指南
- HTML5拖放实现的RPSLS游戏教程
- HT://Dig引擎接口,Ampoliros开源模块应用
- 全面探测服务器性能与PHP环境的iprober PHP探针v0.024
- 新版提醒应用v2:基于MongoDB的数据存储
- 《我的世界》东方大陆1.12.2材质包深度体验
- Hypercore Promisifier: JavaScript中的回调转换为Promise包装器
- 探索开源项目Artifice:Slyme脚本与技巧游戏
- Matlab机器人学习代码解析与笔记分享
- 查尔默斯大学计算物理作业HP2解析
- GitHub问题管理新工具:GIRA-crx插件介绍
