飞思卡尔智能小车技术报告:华中科技大学获奖论文
需积分: 0 155 浏览量
更新于2024-08-01
1
收藏 1.56MB PDF 举报
"飞思卡尔智能小车.pdf 华中科技大获奖论文"
这篇技术报告详细阐述了华中科技大学参赛队伍在第一届“飞思卡尔”杯全国大学生智能汽车邀请赛中的研究成果,主要关注智能寻迹小车的控制算法研究与程序设计。报告由九头鸟团队的程钊、刘广林、唐旋来撰写,指导教师是彭刚。
报告的章节分布如下:
1. 引言:这部分简要介绍了智能小车的基本构成,它基于飞思卡尔的16位微控制器MC9S12DG128B,利用多种传感器(如反射式红外传感器)进行信息采集,并应用PWM技术控制舵机和电机,同时具备LCD和键盘模块作为人机交互界面。
2. 智能小车设计分析:详细探讨了设计要求、总体设计思路以及方案论证。其中,设计要求涵盖了路径检测、速度监测、人机交互等功能;总体设计则阐述了小车的整体架构;方案论证部分讨论了传感器和控制算法的设计选择。
3. 智能小车硬件设计:涵盖机械和电路两个方面。机械设计包括车模结构特点、寻迹传感器布局以及系统电路板的安装连接。电路设计涉及传感器电路、测速传感器、电源管理、驱动模块和调试模块的设计细节。
4. 软件设计:主要讨论了程序的总体流程、PID控制算法、舵机方向控制算法以及速度控制算法的实现。
5. 开发流程:介绍了单片机资源的分配、编译环境的配置以及下载调试的过程。
6. 开发总结与心得:团队分享了开发调试过程中遇到的问题,如电源管理、PID微分误差和电机电磁干扰等问题的解决方案,以及对未来发展的总结和展望。
附录部分包括研究论文、程序清单、红外传感器参数说明和配件清单,提供了更深入的技术细节和参考资料。
这份技术报告展示了智能小车从概念到实现的完整过程,对于学习和理解嵌入式系统、自动控制、传感器应用和电机控制等方面的知识具有很高的参考价值。通过阅读,读者可以了解到如何将理论知识应用于实际项目,同时也能学习到如何解决在项目开发中可能遇到的实际问题。
第一届全国大学生智能汽车邀请赛技术报告
车车轮转过一周所用的时间 T,通过公式进行计算即可得到小车当前的运行速度
V。
3.2.3 电源管理模块
智能车系统根据各部件正常工作的需要,对配发的标准车模用 7.2V
2000mAh Ni-cd 蓄电池进行电压调节。其中,单片机系统、路径识别的光电传感
器和接收器电路、车速传感器电路,LCD 显示电路,需要 5V 电压,伺服电机工
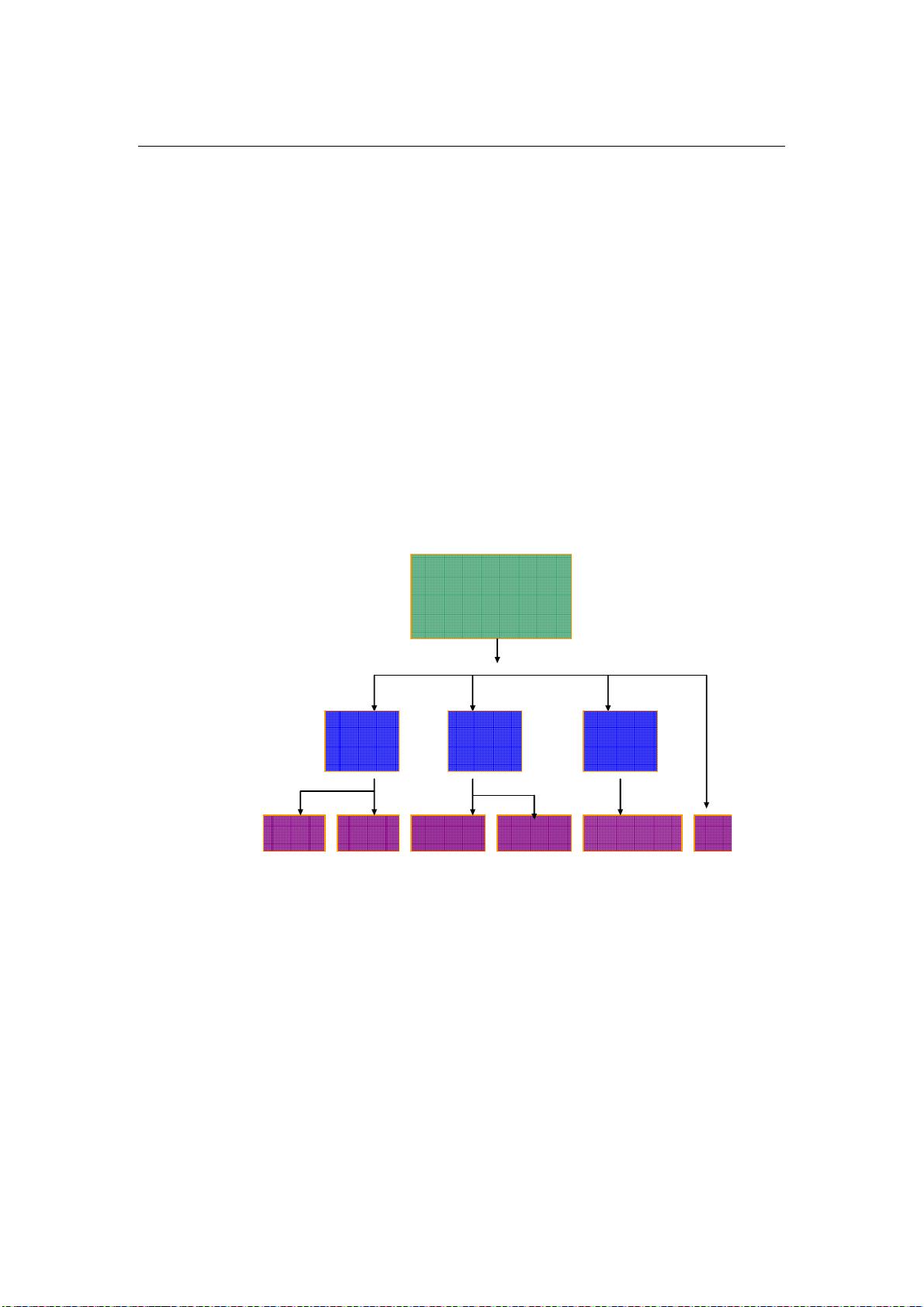
作电压范围 4.8V 到 6V。智能车的电源调节图如下图所示:
图 3-3 电压调节图
Main Battery
[ACEAF06]CP
7.2V2000mAh Ni_cd
Encod
LM2940
(5V)
Sensor T_Board Serve Motor Mot
o
LM2940
(5V)
LM2940
(5V)
LCD
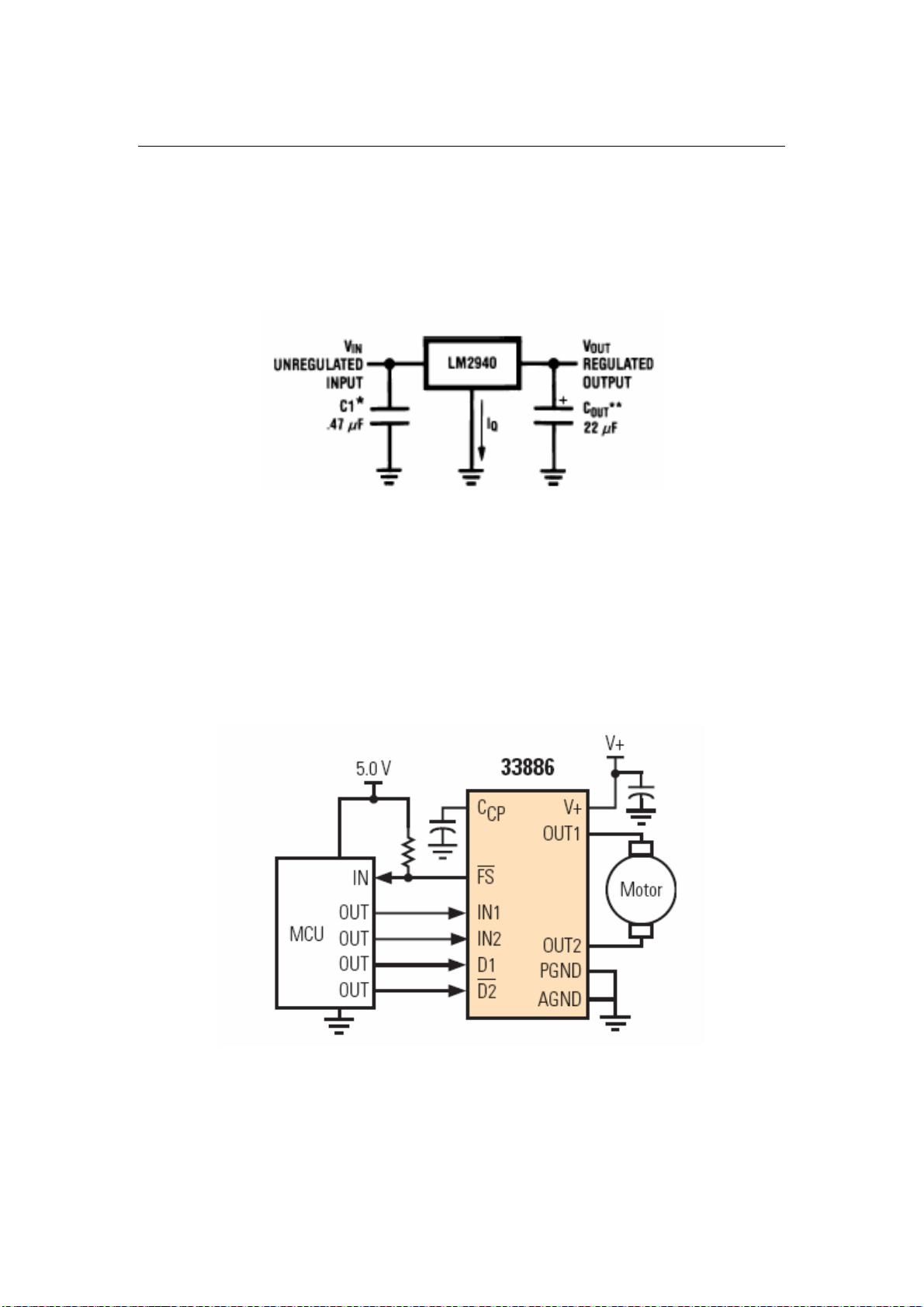
在电源管理芯片的选择中,常用的是 LM7805,LM7806。但由于电池的工
作电压为 7.2V.而 LM7805,LM7806 正常工作时,其输入输出引脚之间的电压差
通常为 2~3V,驱动电机工作时引起瞬间电压下降,造成芯片输出电压下降,影
响其他模块的工作。经过实验我们确实也发现了此种情况,因此我们采用的是
低压降的芯片 LM2940(LM2940 的电路图如下图 3-4 所示),为了避免各个模
块的供电相互干扰,设计中,采用了三片 LM2940,每一芯片单独为一个模块供
9

剩余61页未读,继续阅读
2021-01-11 上传
2010-01-06 上传
2023-08-14 上传
2023-05-13 上传
2023-10-03 上传
2023-05-29 上传
2023-12-25 上传
2023-07-06 上传

crmzby
- 粉丝: 5
- 资源: 37
 我的内容管理
展开
我的内容管理
展开







最新资源
- Angular实现MarcHayek简历展示应用教程
- Crossbow Spot最新更新 - 获取Chrome扩展新闻
- 量子管道网络优化与Python实现
- Debian系统中APT缓存维护工具的使用方法与实践
- Python模块AccessControl的Windows64位安装文件介绍
- 掌握最新*** Fisher资讯,使用Google Chrome扩展
- Ember应用程序开发流程与环境配置指南
- EZPCOpenSDK_v5.1.2_build***版本更新详情
- Postcode-Finder:利用JavaScript和Google Geocode API实现
- AWS商业交易监控器:航线行为分析与营销策略制定
- AccessControl-4.0b6压缩包详细使用教程
- Python编程实践与技巧汇总
- 使用Sikuli和Python打造颜色求解器项目
- .Net基础视频教程:掌握GDI绘图技术
- 深入理解数据结构与JavaScript实践项目
- 双子座在线裁判系统:提高编程竞赛效率
