HyperBus技术详解:高性能DDR总线的信号优化
需积分: 34 171 浏览量
更新于2024-06-30
收藏 1.61MB PDF 举报
"HyperBus时序规范:低信号计数,高性能DDR总线"
HyperBus(Hyper Bus Specification)是一种高速、低引脚数的接口技术,主要用于连接主机系统(如微处理器、微控制器或ASIC设备)与存储器(如RAM、Flash存储器)和其他外围设备。该规范设计的主要目标是实现高性能数据传输,同时降低信号数量,从而减少电路板空间占用,简化系统设计,并降低功耗。
HyperBus接口采用DDR(Double Data Rate)技术,这意味着数据在时钟的上升沿和下降沿都被传输,显著提高了数据传输速率。相比于传统的SPI、I2C或UART等接口,HyperBus具有更高的带宽和更低的延迟,适用于需要快速读写操作的应用场景。
主要特性包括:
1. **低信号计数**:HyperBus接口通常只需要8条信号线(4个数据线、2个时钟线、1个片选线和1个命令/地址线),大大减少了所需的物理连接,使得硬件设计更为简洁。
2. **高性能**:由于使用DDR技术,数据传输速率可达到几百兆比特每秒,甚至吉比特每秒级别,满足高速存储访问的需求。
3. **通用的主-从总线架构**:HyperBus支持多设备连接,主机可以控制多个从设备,方便构建复杂的系统架构。
4. **灵活性**:HyperBus协议允许不同类型的存储器和设备共存,适应性强,能广泛应用于各种嵌入式系统。
5. **低功耗**:通过优化的协议和时序设计,HyperBus能够在保持高性能的同时,减少能源消耗,适合电池供电的便携式设备。
6. **易于集成**:由于其简单的接口和协议,HyperBus容易被系统设计师集成到现有设计中,缩短产品开发周期。
7. **兼容性**:尽管由Cypress Semiconductor(现为Infineon Technologies的一部分)开发,但HyperBus规范已被广泛接受,其他厂商也提供兼容的解决方案,确保了市场的广泛支持和长期可用性。
在具体应用中,例如在物联网(IoT)设备、汽车电子、工业控制、移动设备等领域,HyperBus因其高效率和低功耗而受到青睐。Infineon将继续提供和支持HyperBus产品,确保文档内容和订购零件编号的连续性。
总体来说,HyperBus时序规范是现代电子设计中提高性能、降低成本和复杂性的理想选择,尤其对于那些需要快速数据交换和低功耗特性的系统。
Document Number: 001-99253 Rev. *H Page 7 of 44
HyperBus™ Specification
HyperBus Specification
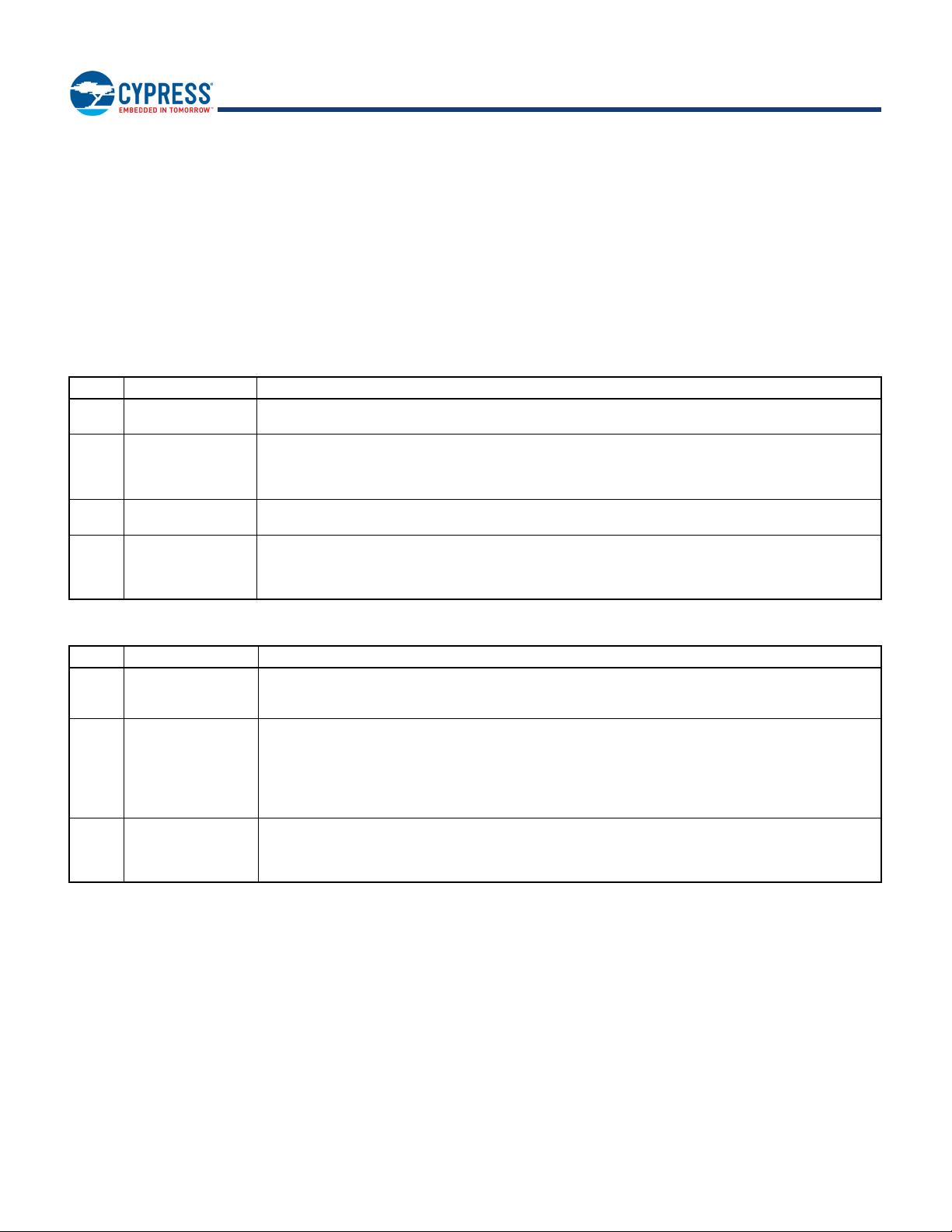
2. HyperBus Signal Descriptions
2.1 Input/Output Summary
HyperBus has a mandatory set of signals as well as optional signals that are supported by some but not all HyperBus compatible
devices. Active Low signal names have a hash symbol (#) suffix.
Table 2.1 Mandatory I/O Summary
Symbol Type Description
CS#
Master Output, Slave
Input
Chip Select. Bus transactions are initiated with a High to Low transition. Bus transactions are terminated with a
Low to High transition. The master device has a separate CS# for each slave.
CK,
CK#
Master Output, Slave
Input
Differential Clock. Command, address, and data information is output with respect to the crossing of the CK and
CK# signals. Differential clock is used on 1.8V I/O devices.
Single Ended Clock. CK# is not used on 3.0V devices, only a single ended CK is used.
The clock is not required to be free-running.
DQ[7:0] Input/Output
Data Input/Output. Command, Address, and Data information is transferred on these signals during Read and
Write transactions.
RWDS Input/Output
Read Write Data Strobe. During the Command/Address portion of all bus transactions RWDS is a slave output
and indicates whether additional initial latency is required. Slave output during read data transfer, data is edge
aligned with R WDS. Slave input during data transfer in write transactions to function as a data mask.
(High = additional latency, Low = no additional latency).
Table 2.2 Optional I/O Summary
Symbol Type Description
RESET
#
Master Output, Slave
Input,
Internal Pull-up
Hardware RESET. When Low the slave device will self initialize and return to the Standby state. RWDS and
DQ[7:0] are placed into the High-Z state when RESET# is Low. The slave RESET# input includes a weak pull-
up, if RESET# is left unconnected it will be pulled up to the High state.
RSTO#
Master Input, Slave
Output, Open Drain
RESET Output. RSTO# is an open-drain output used to indicate when a Power-On-Reset (POR) is occurring
within the slave device and can be used as a system reset signal. Upon completion of the internal POR, a user
defined timeout period can extend the RSTO# Low time. Following the POR and user defined extension time,
RSTO# signal will cease driving Low so the master or external resistance can pull the signal to High . There is no
internal pull-up required on this signal, however, some slave devices may provide an internal pull-up as a device
specific feature.
INT#
Master Input, Slave
Output, Open Drain
Interrupt Output. When INT# is Low the slave device is indicating that an internal event has occurred. This
signal is intended to be used as a system interrupt from the slave device to indicate that an on-chip event has
occurred. INT# is an open-drain output. There is no internal pull-up required on this signal, however, some slave
devices may provide an internal pull-up as a device specific feature.

剩余44页未读,继续阅读
291 浏览量
264 浏览量
点击了解资源详情
2022-09-22 上传
2875 浏览量
242 浏览量
200 浏览量
点击了解资源详情
点击了解资源详情

zimoshc
- 粉丝: 10
- 资源: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- netbeansMaria:Netbeans示例
- java基于spring boot2开发的java个人理财系统
- SQL Server 2008-使用SMO备份和还原数据库
- 黑白商务色系UI界面风格工作汇报ppt模板.zip
- 四张清新白色微立体文本框素材PPT模板
- 移动存储设备公司网页模板
- php+mysql学生成绩查询(源码).zip
- IRSEC-2021
- c语言数据结构几个链表操作List.zip
- WebBrowser:这是一个Web浏览器
- 城市化网络营销网页模板
- 黑色通用服务公司响应式网站模板
- 状态
- 分布式综合报表管理系统在银行业的应用研究开题报告-论文.zip
- Sharepoint网站安装和配置脚本
- 自己收集里最好的hifi音效.zip
