爬楼轮椅前腿控制系统研究:基于STC单片机的实现与优化
版权申诉
99 浏览量
更新于2024-06-15
收藏 38.96MB PDF 举报
"基于单片机的爬楼轮椅前腿机构控制系统研究"
本文详细探讨了基于单片机的爬楼轮椅前腿机构控制系统的开发与实现,旨在为这一特殊的助行设备提供更为先进和可靠的控制策略。爬楼轮椅在应对我国日益严重的老龄化和肢体残疾问题上具有重要意义,尤其是在多数低层建筑缺乏电梯的背景下。
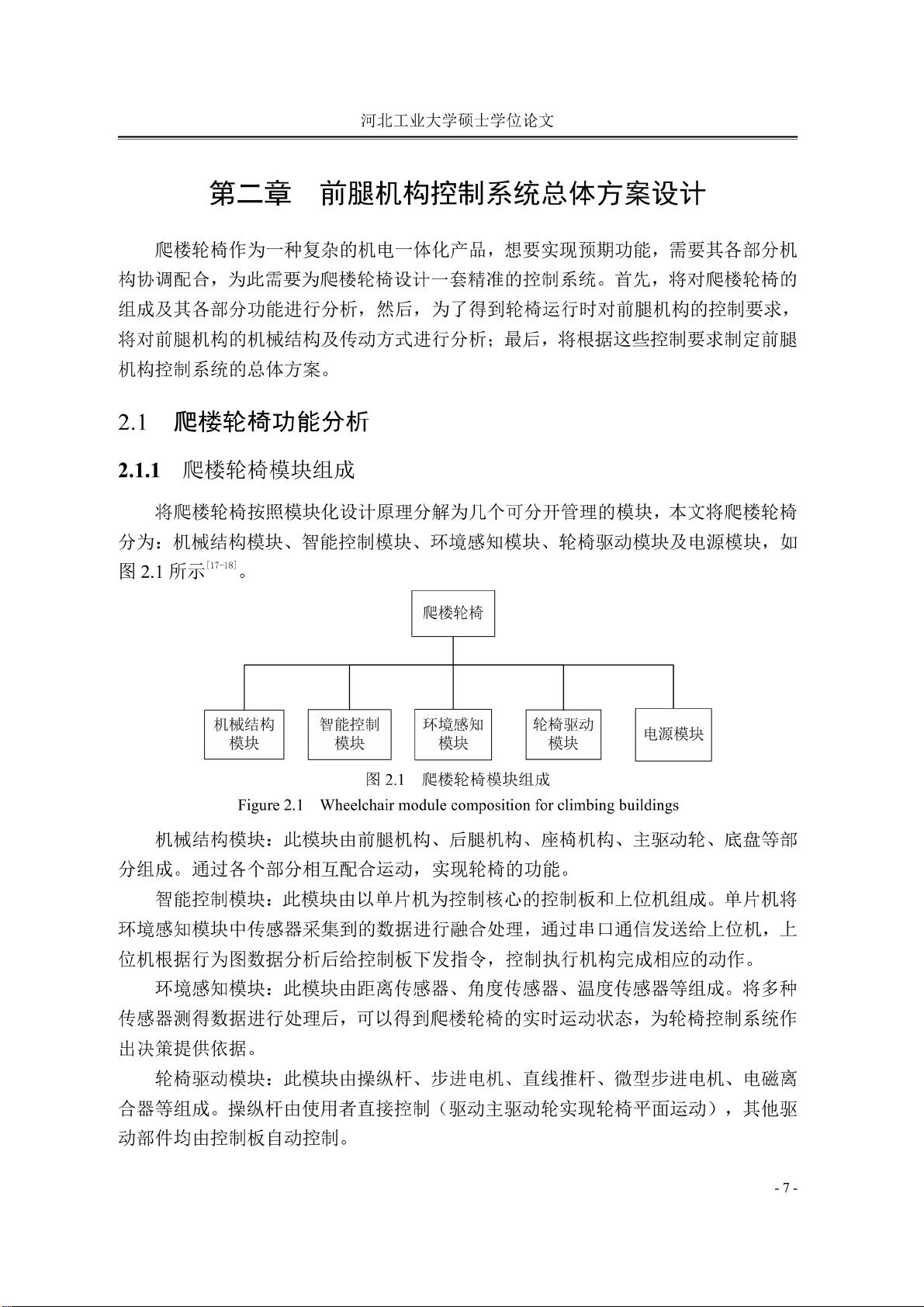
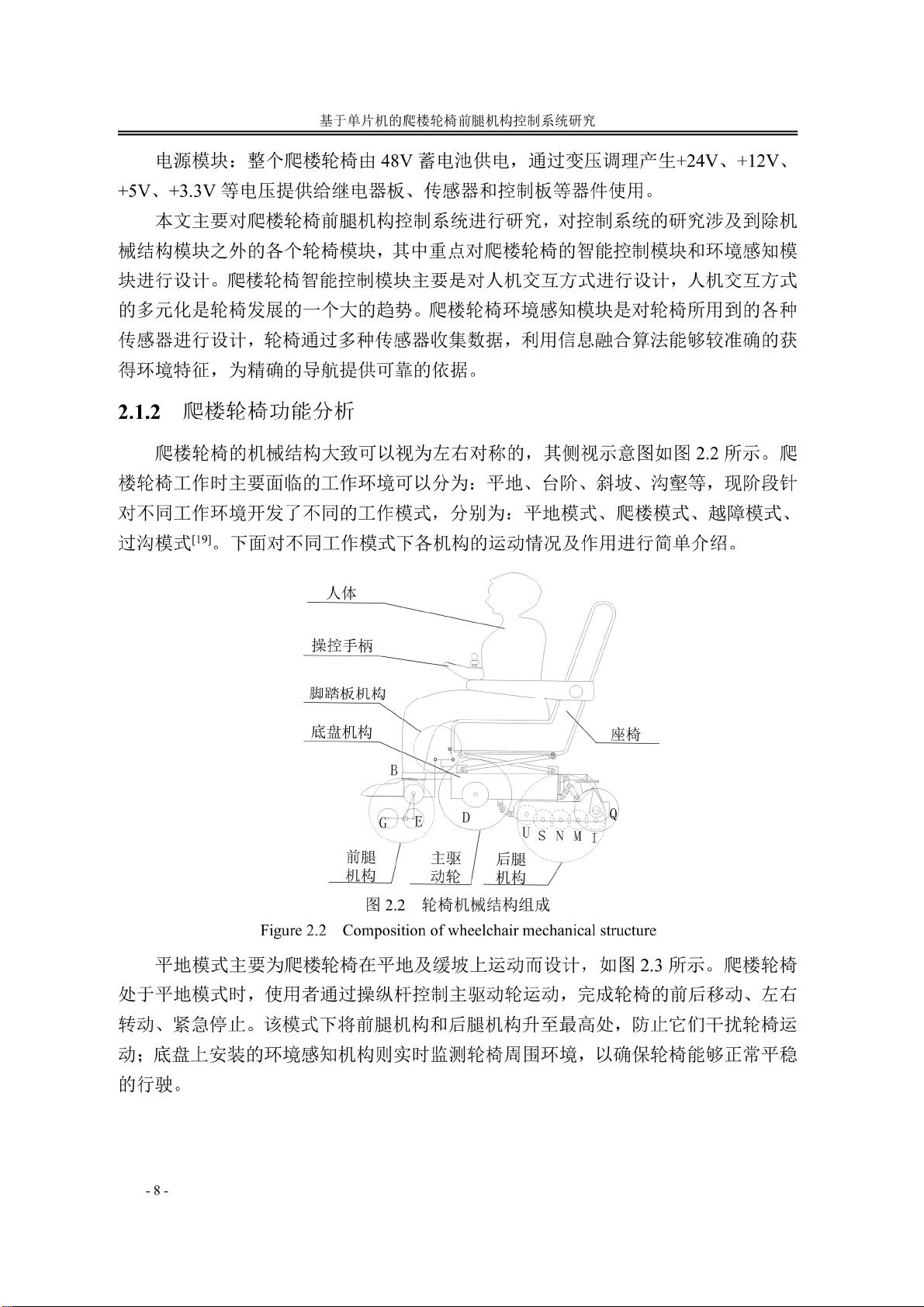
在系统设计初期,作者明确了前腿机构在爬楼轮椅的不同工作模式下扮演的角色,包括前腿升降机构、底盘环境感知机构和前腿位姿调节机构。这些机构协同工作,确保轮椅能够安全、有效地攀爬楼梯。通过分析轮椅动作需求和预期功能,确立了系统的总体设计方案。
在硬件设计方面,以STC单片机为核心,构建了控制板,并设计了多机通信电路、传感器应用电路和电机驱动电路。软件设计涵盖了整体控制系统的框架搭建,包括主程序和各个子程序的编写,系统设有手动、上位机和自动三种运行模式,适用于不同阶段的需求。
在控制系统中,模糊PID控制算法被应用于各执行机构的运动控制,以提高精度和响应速度。测试阶段,作者在爬楼轮椅实验平台上对程序进行了实际验证,重点关注上下位机通信、传感器数据检测和执行机构的控制性能。在测试过程中,针对通信中断和数据完整性问题进行了优化和调试。
这项毕业设计深入研究了爬楼轮椅前腿机构的控制技术,通过单片机实现精确控制,结合模糊PID算法优化控制效果,为提升爬楼轮椅的性能和实用性提供了坚实的技术基础。随着新材料和新技术的发展,未来爬楼轮椅有望实现更高程度的智能化,以满足更多用户的需求。此项研究为我国自主开发价格适中、性能稳定的爬楼轮椅铺平了道路,对于推动我国在养老服务机器人领域的创新具有积极的促进作用。

点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情

电气_空空
- 粉丝: 5161
- 资源: 1342
 我的内容管理
展开
我的内容管理
展开







