AUTOSAR下CAN通信栈设计详解
需积分: 14 85 浏览量
更新于2024-06-27
1
收藏 9.2MB PDF 举报
本文档详细介绍了如何在AUTOSAR(AUTomotive Open System Architecture)环境中实现CAN(Controller Area Network)通信栈软件的设计。随着汽车工业的复杂性日益增加,传统的汽车嵌入式系统设计方法已经难以应对这种挑战。为了提升系统的可维护性和模块化,许多全球领先的汽车制造商正在采用AUTOSAR标准,这是一种开放的软件架构框架,旨在统一和简化汽车电子系统的设计与开发。
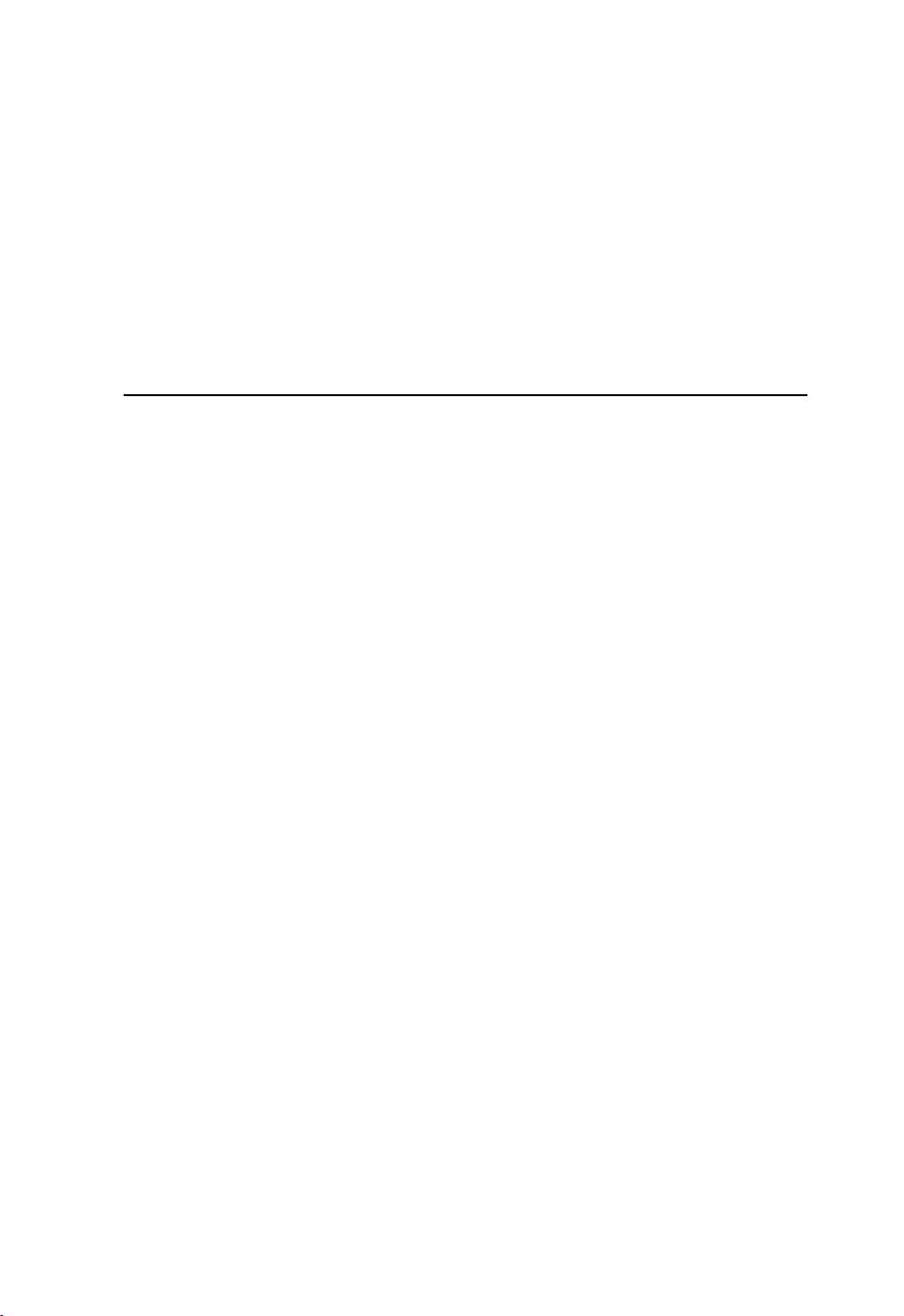
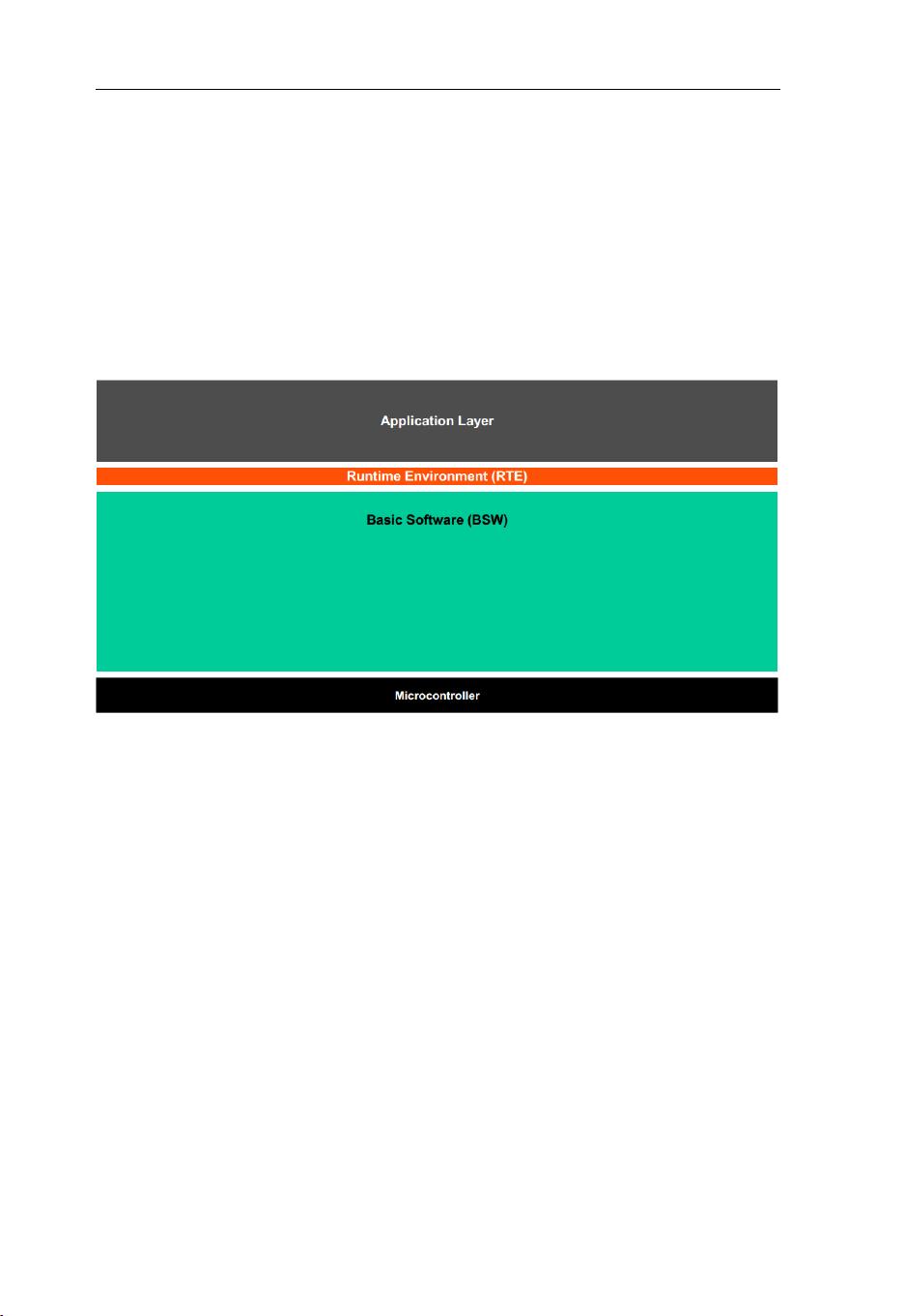
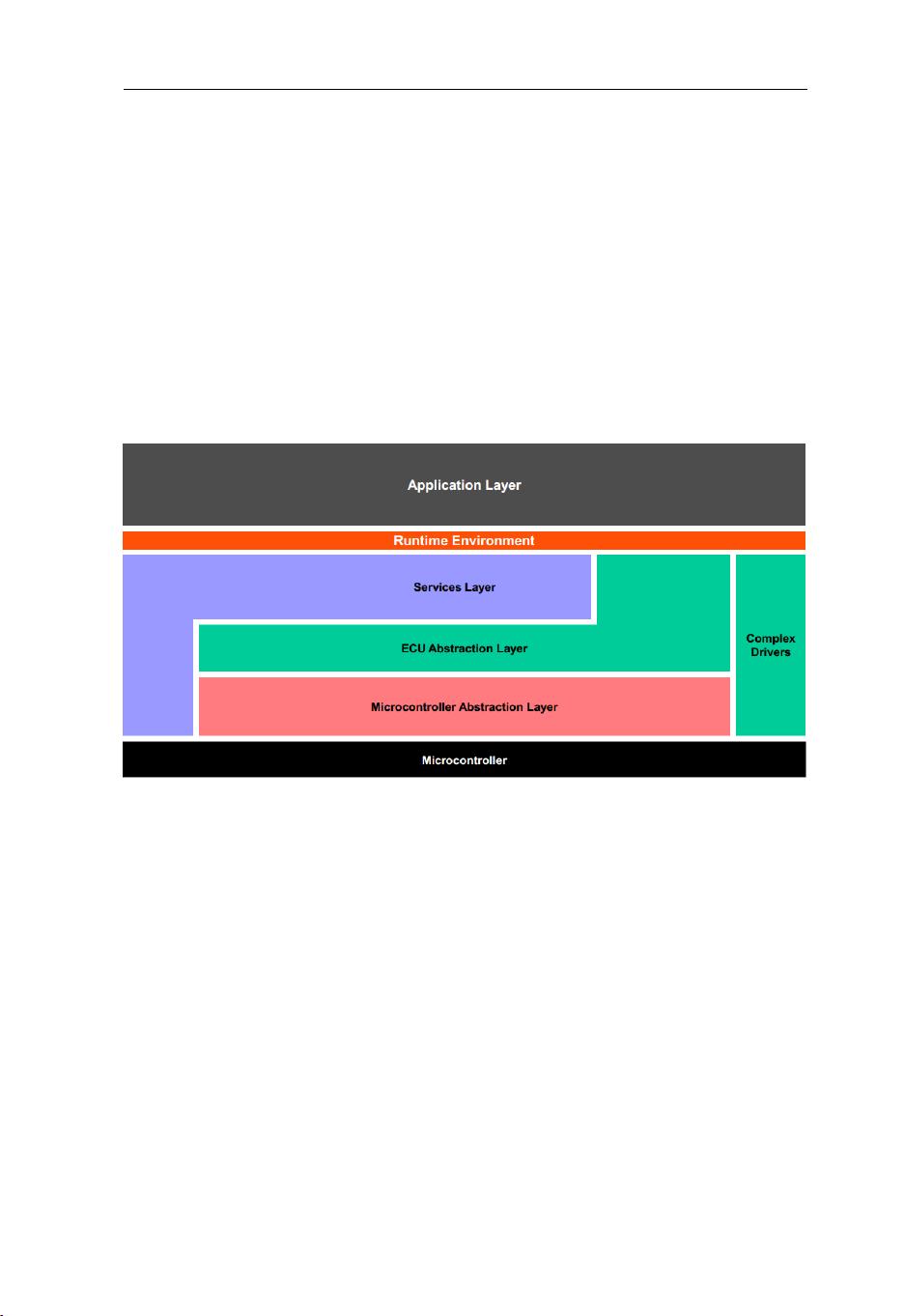
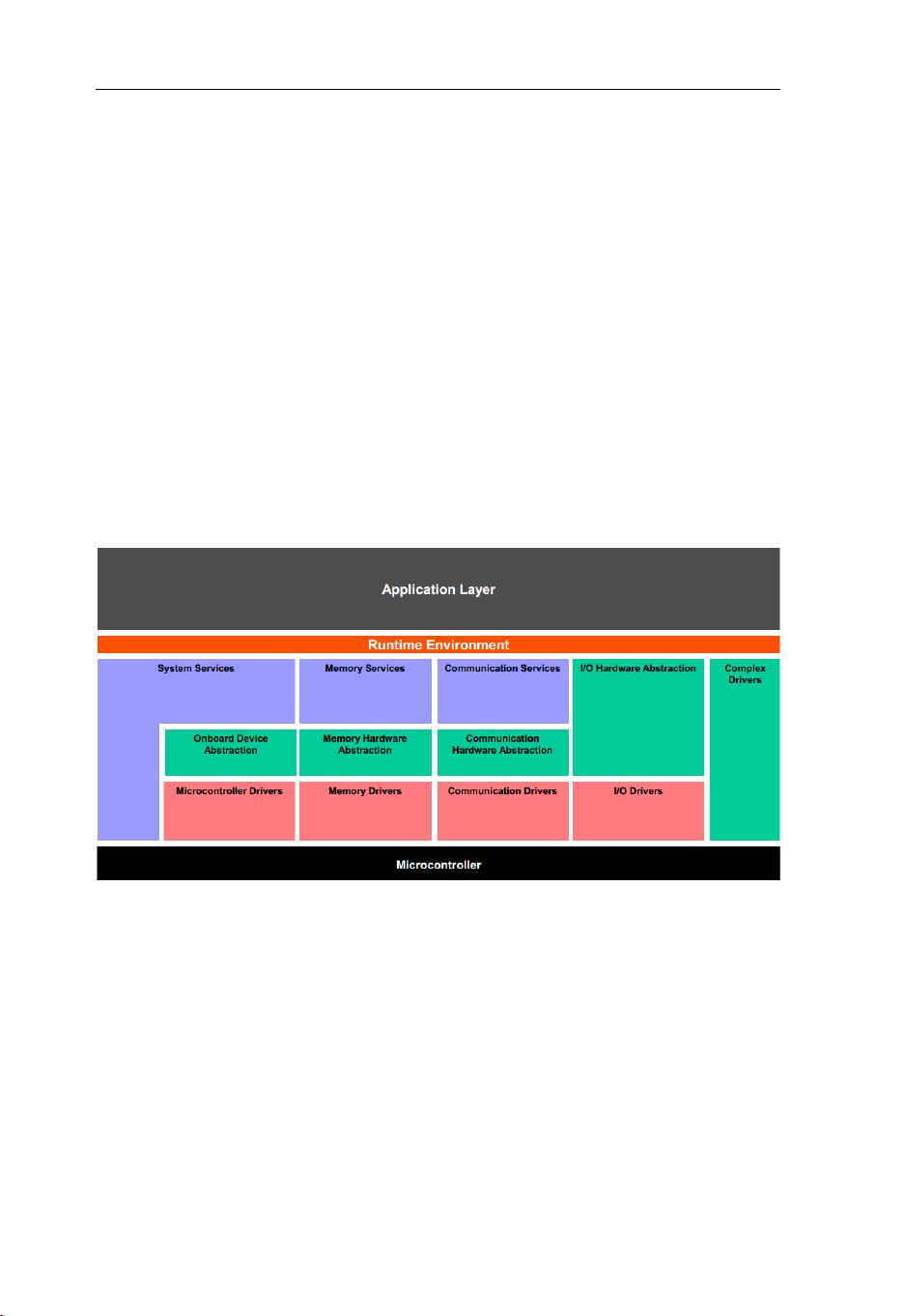
AUTOSAR定义了一套通用的软件层结构,其中包括OSI模型的抽象,如应用层、驱动接口层(DRL)、网络管理器接口层(NMIL)等,这些层之间通过服务接口进行交互。在该背景下,实现CAN通信栈意味着开发符合AUTOSAR标准的软件模块,以处理CAN通信协议,并确保与其他系统组件的有效集成。
CAN通信栈的主要功能包括数据传输、错误检测和恢复、消息格式化、以及与AUTOSAR上层模块的交互。在AUTOSAR中,CAN通信栈通常作为低层网络服务,运行在硬件驱动之上,负责处理CAN控制器的具体操作,如发送和接收帧,管理帧的发送队列等。
设计过程涉及以下几个关键步骤:
1. **需求分析**:首先,理解系统的需求和CAN通信的具体应用场景,确定所需的功能和性能指标。
2. **接口设计**:根据AUTOSAR规范,定义CAN通信栈与上层应用和服务的接口,确保兼容性和互操作性。
3. **CAN库的选择或实现**:选择现有的开源库或自行编写代码实现CAN通信协议栈,确保其符合ISO 11898标准。
4. **测试与验证**:进行详尽的单元测试和系统级测试,确保CAN栈的正确性和可靠性。
5. **集成与调试**:将CAN通信栈整合到AUTOSAR架构中,通过模拟或实际硬件进行集成测试,解决可能存在的冲突和错误。
6. **文档编写**:提供详细的用户手册和技术文档,以便其他开发者理解和使用通信栈。
7. **维护与更新**:随着AUTOSAR标准的演进和汽车技术的发展,定期更新和维护通信栈以适应新的需求。
本文献由Johan Alexandersson和Olle Nordin两位学生在Linköping University的电气工程系完成,他们的研究工作是在Anders Nilsson和Simon Tegelid的指导下进行的,这是一份重要的实践报告,展示了如何在AUTOSAR环境中成功构建一个高效、可靠的CAN通信栈,为汽车电子系统的现代化和标准化提供了有价值的参考。

485 浏览量
456 浏览量
130 浏览量
394 浏览量
1244 浏览量
2020-07-22 上传

asspeed
- 粉丝: 0
- 资源: 7
 我的内容管理
展开
我的内容管理
展开







