CAN/LIN混合网关:重构汽车电子通信架构
66 浏览量
更新于2024-08-30
收藏 194KB PDF 举报
随着汽车电子技术的飞速发展,传统的点对点通信模式已无法满足现代汽车内部复杂且高效的信息交换需求。汽车电子网络技术应运而生,作为汽车控制系统的关键组成部分,它推动了汽车电子技术迈向了一个全新的阶段。SAE分类的A、B、C类网络系统,分别对应不同的数据传输速率和应用范围,其中A类(低速)主要用于传感器和执行器间的通信,而B类和C类网络则涉及到更高的数据速率和更广泛的控制功能。
CAN(Controller Area Network)总线由德国Bosch公司于1986年提出,作为一种高效的串行通信协议,被广泛应用于汽车工业,支持高速数据传输。LIN(Local Interconnect Network)则是在1998年由宝马等汽车制造商提出的,旨在提供一种低成本、单线连接、支持单主多从的通信方式,其最高传输速率为20kb/s,适用于对成本敏感的应用。
在实际的汽车网络架构中,A、B、C类网络并非孤立存在,它们需要通过网关进行数据交换和协议转换。网关的设计至关重要,它的核心功能包括数据存储转发、不同协议间的转换,如CAN与LIN之间的切换,确保数据能在不同网络间无缝通信。网关主要由四个关键组件构成:
1. 主控制器:作为网关的中枢,负责数据的接收、存储、管理和协议转换。它接收来自各节点的数据,根据数据的目的网络,将其存储在不同的缓冲区,并调整数据格式以适应目标网络的需求。
2. 高速CAN节点模块:专用于连接速度较快的CAN网络,处理高速数据流。
3. 低速CAN节点模块:连接到低速CAN网络,处理低速传感器和执行器的数据。
4. LIN节点模块:负责与LIN网络的交互,同样支持双向数据交换。
网关电路设计需要精心规划,以确保在不同网络间的数据传输稳定、高效且可靠。通过这种设计,现代汽车能够实现更加智能化和互联化的操作,提升了驾驶安全性和舒适性。同时,随着新兴技术如5G和物联网的融入,未来的汽车网关可能会集成更多功能,以满足不断增长的车联网需求。
基于基于CAN//LIN总线的汽车混合网关设计总线的汽车混合网关设计
传统的点对点的通信已经不能满足现代汽车通信的要求。汽车电子网络技术正成为实现汽车控制系统的首选,
它使汽车电子技术进入一个全新的时代。
引引 言言
随着汽车电子的发展,传统的点对点的通信已经不能满足现代汽车通信的要求。汽车电子网络技术正成为实现汽车控制系
统的首选,它使汽车电子技术进入一个全新的时代。
20世纪 90年代,美国汽车工程师协会SAE(Society of AutomoTIve Engineers)将汽车数据传输网分成了A、B、C三类:A
类网络主要面向传感器/执行器的低速网络,数据传输位速率一般小于10 kb/s,目前A类网的首选标准为
1986 年2月,德国的Bosch公司在SAE大会上提出了CAN串行总线。时至今日,
LIN 是1998年由BMW等五家汽车制造商、一家软件工具制造商以及一家半导体厂商联合提出的一个协议。LIN通信是基
于SCI(UART)数据格式,采用单主/多从模式以及低成本的单线连接方式,最高传输速率可达20kb/s。
在实际的汽车电子网络中,A、B、C三类网络并不是完全独立的。为了完成车辆的控制及信息共享,不同网络间必须进
行相应的数据交换。由于是三种不同的网络,它们之间的通信是不能直接进行的,而必须作相应的协议转换及数据处理后才能
实现,这些工作是由
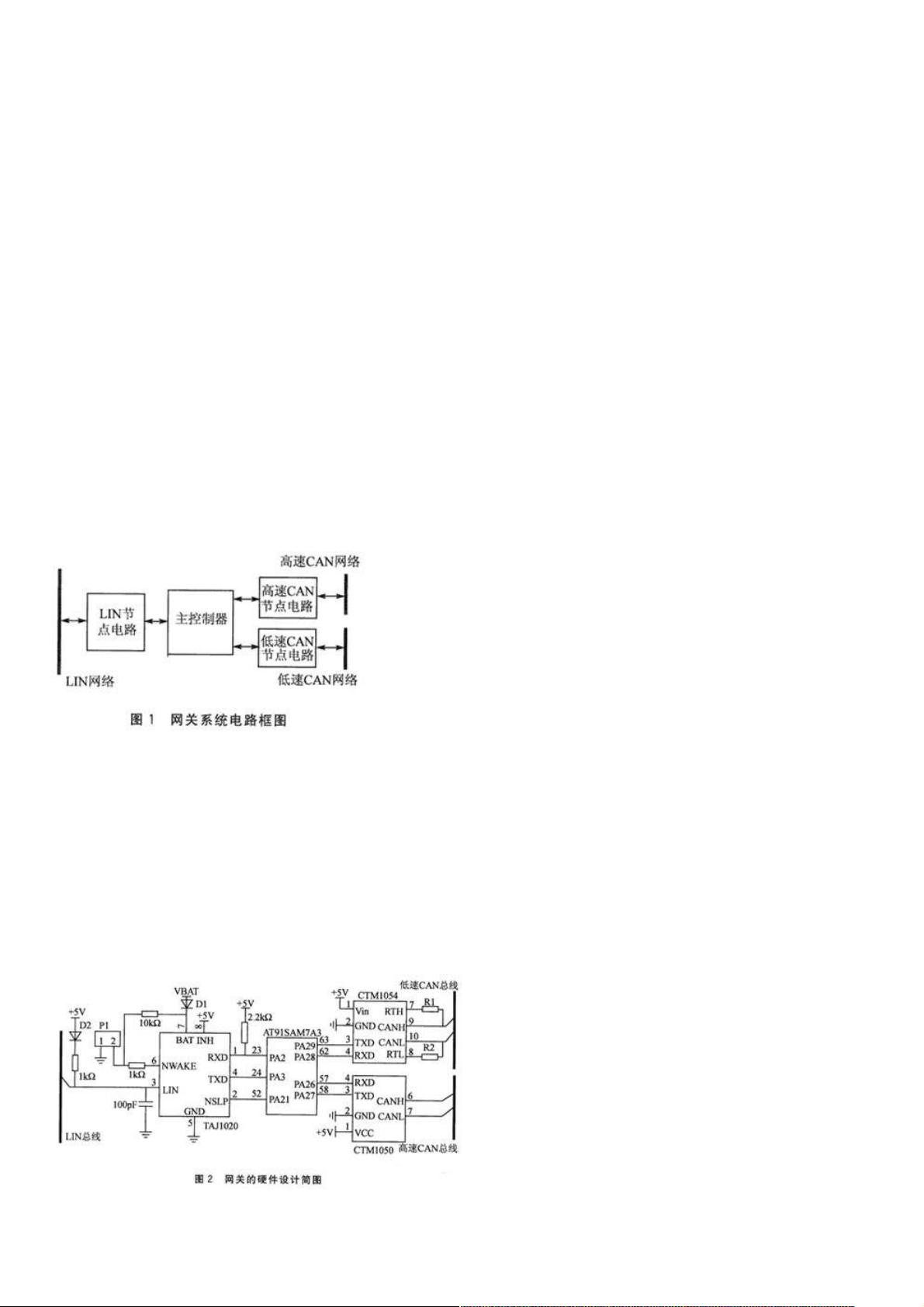
1 网关总体结构网关总体结构
本文所讨论的网关其主要任务是解决车载网络中A、B、C三类网络的相互通信的问题,实现数据的存储转发及高、低速
CAN协议之间或低速CAN与LIN协议之间的协议转换,以便在不同网络之间实现数据通信。网关主要分为4个部分:实现数据
存储转发和协议转换的主控制器,用于与高速CAN网络连接的高速CAN 节点模块,与低速CAN网络连接的低速
网关中三个节点电路分别与各自的网络相连,且实现各自对应的网络与主控制器之间的数据交换。这个数据交换过程是双
向的,既包括从网络上接收数据并将数据存到主控制器中,又包括从主控制器相应的缓存器中读取数据并将其发送到自己对应
的网络中。主控制器主要负责数据的存储及协议的转换,即将各个节点接收来的数据根据其目的网络的不同,分别存入不同的
缓冲区,并且根据目的网络的不同,将数据转化为能够在目的网络上传送的数据格式。
2 网关电路设计网关电路设计
如上所述,网关的硬件电路主要由主控制器、高速CAN节点模块、低速CAN节点模块、LIN节点模块4部分组成。为了满
足网关的正常通信要求,必须考虑主控制器的数据处理能力。另外,由于网关的工作环境为电磁干扰非常严重的汽车内部,故
还须考虑网关的抗噪声干扰性能。网关的硬件设计简图如图2所示,
AT91SAM7A3为网关的主控制芯片,TJA1020为LIN总线收发器,CTM1054为低速CAN收发器,CTM1050为高速CAN收发
器。
2.1 主控制器的选择
下载后可阅读完整内容,剩余3页未读,立即下载
2020-10-26 上传
2020-07-24 上传
2020-07-29 上传
点击了解资源详情
2020-10-22 上传
2020-11-06 上传
2020-11-11 上传
2020-11-18 上传
点击了解资源详情

weixin_38640674
- 粉丝: 2
- 资源: 960
 我的内容管理
展开
我的内容管理
展开







最新资源
- 探索数据转换实验平台在设备装置中的应用
- 使用git-log-to-tikz.py将Git日志转换为TIKZ图形
- 小栗子源码2.9.3版本发布
- 使用Tinder-Hack-Client实现Tinder API交互
- Android Studio新模板:个性化Material Design导航抽屉
- React API分页模块:数据获取与页面管理
- C语言实现顺序表的动态分配方法
- 光催化分解水产氢固溶体催化剂制备技术揭秘
- VS2013环境下tinyxml库的32位与64位编译指南
- 网易云歌词情感分析系统实现与架构
- React应用展示GitHub用户详细信息及项目分析
- LayUI2.1.6帮助文档API功能详解
- 全栈开发实现的chatgpt应用可打包小程序/H5/App
- C++实现顺序表的动态内存分配技术
- Java制作水果格斗游戏:策略与随机性的结合
- 基于若依框架的后台管理系统开发实例解析
