工业机器人涂胶程序框架详解与PLC交互操作指南
需积分: 50 130 浏览量
更新于2024-09-03
2
收藏 203KB PDF 举报
本资源是一份关于工业机器人的涂胶程序框架详细教程,主要针对FANUC机器人系统。文档首先介绍了程序框架PNS0001,它主要用于初始化和循环调用功能程序,包括设置坐标系、关闭3D相机等步骤。这个框架的核心部分是COMMISSION模块,其中定义了不同的路径号选择,每个路径号对应着特定的动作流程。
在涂胶流程中,程序通过R[100]变量控制执行顺序,例如调用X1 GOHOME以回到原点,X2 CLEAN用于清除冷却胶,X3和X4执行涂胶轨迹点的前进,X5和X6则进行涂胶区域的前后移动,而X7则负责更换或清洁涂胶嘴。当在自动模式下,机器人会在到达等待涂胶点前进行清洁,如果超过5分钟没有收到新的路径号,机器人会自动返回原点。
更换涂胶嘴的过程分为两种模式:自动模式下,机器人从原点移动到安全位置,然后执行CLEAN功能程序清除旧胶并到达等待涂胶点,接着根据PLC发送的路径号执行涂胶功能。而在手动模式下,机器人会直接执行CHANGETOOL功能程序,从原点移动到安全位置点再至更换涂胶嘴点,或者可以选择直接返回原点。
文档还提供了两个功能程序实例:GOHOME,用于机器人安全地回到原点,以及CLEAN,用于清洗涂胶区域并确保胶的正确应用。整个流程设计既考虑了效率也注重了安全性和灵活性,适合工业自动化生产线上的涂胶任务。
通过学习这份教程,读者能够理解如何构建和优化工业机器人的涂胶程序,提高生产效率和产品质量。对于从事工业机器人操作、编程或维护的人员来说,这是一个非常实用的学习资料,值得深入研究和实践。
涂胶程序框架
➢ PNS0001(初始化,循环调用功能程序)
CALL 初始化程序 INITIALIZATION;(调用坐标系,关闭 3D 相机)
循环执行分支结构 COMMISSION;
➢ COMMISSION(路径号分支结构,PAUSE 结构)
R[100]=GI[100];
SELECT R[100]= 1,CALL X1GOHOME;
= 2,CALL X2CLEAN;(除去冷却胶)
= 3,CALL X3N15AFWD1;
= 4,CALL X4N15AFWD2;
= 5,CALL X5N15AFR1;
= 6,CALL X6N15AFR2;
= 7,CALL X7CHANGETOOL;(更换或清洁涂胶嘴)
= 8,CALL X8MANUALCLEAN;(清理堵胶)
ELSE,CALL X8PAUSE;
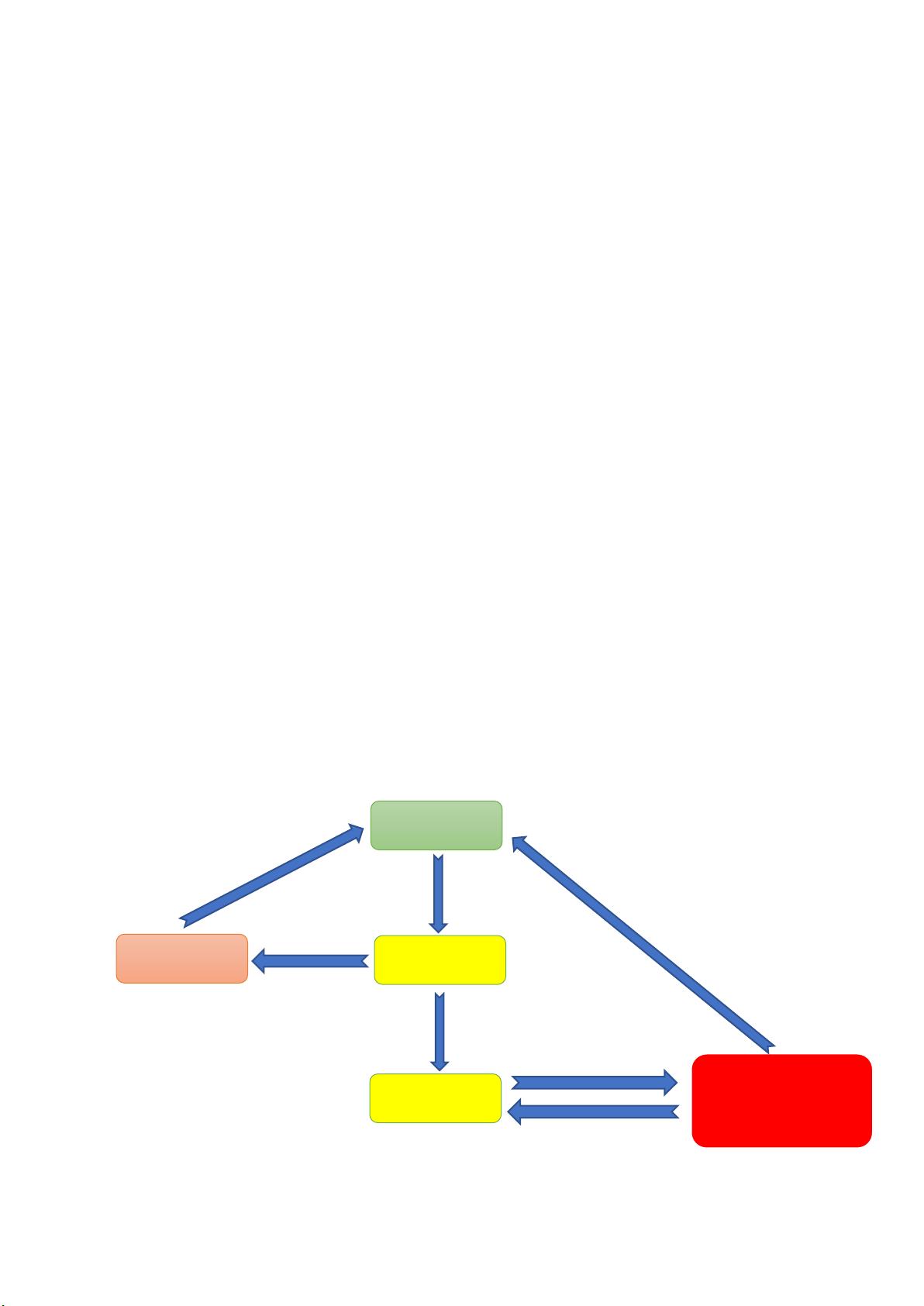
➢ 动作流程
原点
安全位置点
等待涂胶点
涂胶轨迹点
更换涂胶嘴
下载后可阅读完整内容,剩余6页未读,立即下载
2019-09-24 上传
2021-08-14 上传
2021-08-14 上传
2021-08-14 上传
2021-08-08 上传
2021-08-13 上传
2021-08-11 上传

头发没了
- 粉丝: 9
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- 天池大数据比赛:伪造人脸图像检测技术
- ADS1118数据手册中英文版合集
- Laravel 4/5包增强Eloquent模型本地化功能
- UCOSII 2.91版成功移植至STM8L平台
- 蓝色细线风格的PPT鱼骨图设计
- 基于Python的抖音舆情数据可视化分析系统
- C语言双人版游戏设计:别踩白块儿
- 创新色彩搭配的PPT鱼骨图设计展示
- SPICE公共代码库:综合资源管理
- 大气蓝灰配色PPT鱼骨图设计技巧
- 绿色风格四原因分析PPT鱼骨图设计
- 恺撒密码:古老而经典的替换加密技术解析
- C语言超市管理系统课程设计详细解析
- 深入分析:黑色因素的PPT鱼骨图应用
- 创新彩色圆点PPT鱼骨图制作与分析
- C语言课程设计:吃逗游戏源码分享
