ACC自适应巡航系统软件功能与使用场景解析
版权申诉
"辅助驾驶ACC自适应巡航软件功能规范"
这篇文档详细阐述了自适应巡航控制系统(ACC)的软件功能规范,旨在确保系统在各种驾驶场景下安全、有效地工作。自适应巡航控制是一种辅助驾驶技术,它允许车辆在驾驶员设定的速度和跟车模式下自动跟随前车或保持恒定速度行驶。然而,它并不等同于自动驾驶,驾驶员仍然需要时刻准备介入以应对紧急情况。
文件首先介绍了ACC功能的目的和范围,接着列出了相关的术语和缩写。在功能规范部分,文档详细描述了系统的功能用途、基本参数以及通用性要求。功能用途主要涉及如何通过传感器融合、车道识别和执行器方案来实现对车辆速度和方向的控制。基本参数包括设定的巡航速度、跟车距离等,通用性要求则涵盖了系统应具备的适应性。
感知需求与方案中,文档讨论了Sensor Fusion(传感器融合)的需求,以确保系统能够准确识别前方车辆和道路环境。Sensor Lanes(车道感知)和传感器方案的介绍进一步强调了在不同路况下系统如何获取和处理信息。
整车及执行器方案部分,提出了对车辆整体性能和执行器(如纵向和横向控制执行器)的要求,以确保ACC系统的平稳运行。接口描述部分详细列出了输入信号(如驾驶员指令、传感器数据)、输出信号(如车辆控制命令)以及内部参数的定义和功能。
人机交互方案描述了系统如何与驾驶员进行沟通,包括按键设计和仪表显示,以提供清晰的驾驶信息反馈。这部分内容对于确保驾驶员对系统的理解至关重要。
使用场景描述是文档的核心部分,列举了多种可能的驾驶情况,如自适应巡航功能的开启、在不同路面条件下的行驶、隧道内的行驶、目标车辆的加速、减速、切入、切出等。每个场景都详细分析了系统应该如何响应,以保障行车安全和舒适性。
总体来说,这份文件为开发和验证ACC自适应巡航系统的软件提供了全面的功能规范,涵盖了系统设计、感知、控制、人机交互以及各种实际驾驶情境的应对策略。这将有助于制造商构建更智能、更可靠的驾驶辅助系统,提升驾驶体验并增强道路安全。
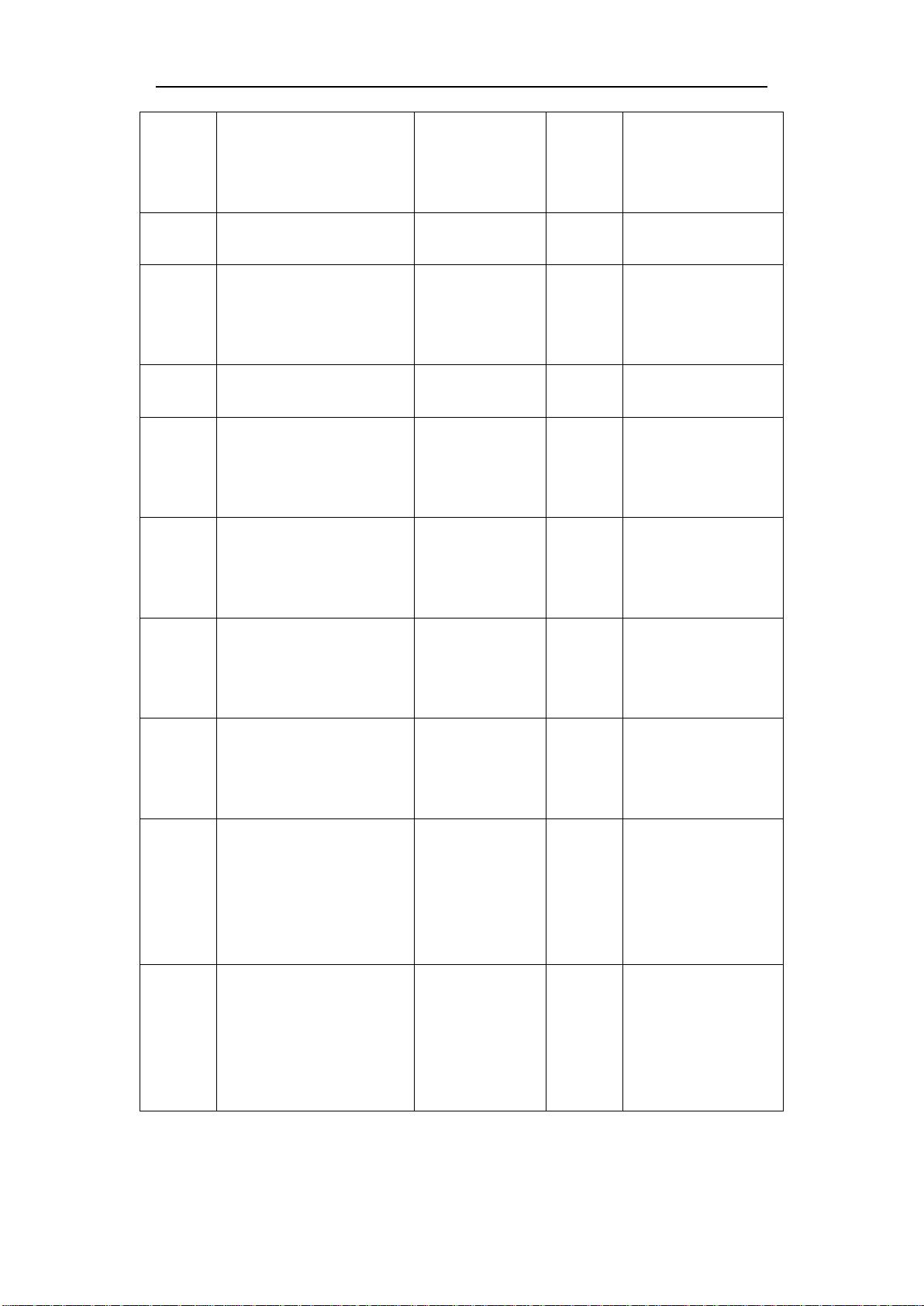
6
跟车时距
[1.5 2.3
3.1 3.9]
s
ACC 跟车控制的
稳态跟车时距,
安全考虑,跟车
时距大于乘用车
7
目标识别距离区间
3~800
m
8
目标识别速度区间
-120~120
km/
h
9
自动跟停距离
6±2
m
10
ACC _SetSpeed_Min
0
km/
h
ACC 最小设定巡
航车速
11
ACC
_SetSpeed_Max
100
km/
h
ACC 最大设定巡
航车速
12
ACC
_SetSpeed_StepS
5
km/
h
ACC 巡航车速调
节步长(短按)
13
ACC
_SetSpeed_StepL
1
km/
h
ACC 巡航车速调
节步长(长按)
14
ACC
_SetSpeed_TLongPr
ess
800
ms
ACC 巡航车速调
节长按时间阈值
15
ACC
_SetSpeed_TShortPr
ess
30
ms
ACC 巡航车速调
节短按时间阈值
剩余53页未读,继续阅读
2023-12-19 上传
2019-03-11 上传
点击了解资源详情
2021-10-19 上传
2021-10-02 上传
2021-10-02 上传
2024-01-12 上传
158 浏览量

电气_空空
- 粉丝: 4904
- 资源: 1273
 我的内容管理
展开
我的内容管理
展开







最新资源
- 前端协作项目:发布猜图游戏功能与待修复事项
- Spring框架REST服务开发实践指南
- ALU课设实现基础与高级运算功能
- 深入了解STK:C++音频信号处理综合工具套件
- 华中科技大学电信学院软件无线电实验资料汇总
- CGSN数据解析与集成验证工具集:Python和Shell脚本
- Java实现的远程视频会议系统开发教程
- Change-OEM: 用Java修改Windows OEM信息与Logo
- cmnd:文本到远程API的桥接平台开发
- 解决BIOS刷写错误28:PRR.exe的应用与效果
- 深度学习对抗攻击库:adversarial_robustness_toolbox 1.10.0
- Win7系统CP2102驱动下载与安装指南
- 深入理解Java中的函数式编程技巧
- GY-906 MLX90614ESF传感器模块温度采集应用资料
- Adversarial Robustness Toolbox 1.15.1 工具包安装教程
- GNU Radio的供应商中立SDR开发包:gr-sdr介绍
