MATLAB/Simulink中PID控制对汽车悬架系统平顺性影响研究
版权申诉
18 浏览量
更新于2024-08-25
收藏 1.11MB PDF 举报
"基于MATLAB/Simulink的车辆悬架系统PID控制对汽车行驶平顺性影响的研究,探讨了PID控制在汽车悬架系统中的应用,以提高汽车的乘坐舒适性和操纵稳定性。"
在现代汽车工程中,行驶平顺性是衡量车辆品质的重要指标之一,而悬架系统作为连接车身与车轮的关键部件,其性能直接影响到汽车的舒适性和安全性。传统的被动悬架在应对复杂路面条件时往往表现不足,因此,引入PID(比例-积分-微分)控制的主动悬架系统成为提升车辆性能的有效途径。
在该研究中,作者王世成利用MATLAB/Simulink这一强大的仿真工具,对二自由度的车辆悬架系统进行了建模和仿真。Simulink是一个图形化建模环境,特别适用于动态系统模拟,包括机械、电气、控制系统等多个领域。通过Simulink,作者设计并实现了PID控制模块,用以调整悬架系统的响应。
研究中,作者以白噪音波形、正弦波和方波作为模拟路面不平度的输入,对比了被动悬架与PID控制的主动悬架在车身垂直速度、悬挂扰度和车身加速度等方面的表现。PID控制器通过调整比例、积分和微分三个参数,能够在不同工况下实时调整悬架的阻尼,以减小车身振动,从而提高行驶平顺性。
通过对比分析,结果证实了PID控制的主动悬架能显著改善车身加速度的动态响应,有效地抑制了由路面不平度引起的振动。这不仅提升了乘客的乘坐舒适性,还增强了车辆的操纵稳定性,确保了在各种路况下的安全性。
此外,论文还强调了悬架系统动态仿真的重要性,传统方法的建模和仿真效率低且难以满足复杂需求,而MATLAB/Simulink的使用简化了这一过程,提高了工作效率,为悬架系统的优化设计提供了便利。
该研究通过实际仿真验证了PID控制在车辆悬架系统中的优越性,为提高汽车行驶平顺性、操纵稳定性和安全性提供了理论依据和技术支持。随着科技的进一步发展,未来可能会有更多高级控制策略应用于汽车悬架系统,以实现更佳的行驶性能和舒适体验。
中国科技期刊数据库 工业A
2016
年
27
期
297
基于Matlab/Simulink的车辆悬架系统PID控制对汽车行驶平顺性影响的研究
王世成
湖北汽车工业学院汽车工程学院,湖北 十堰 442002
摘要:本文借助于MATLAB/Simulink中对二自由度的车辆悬挂系统进行了建模与仿真分析,对PID控制的模块进行了仿真模
块设计并实现了仿真验证,分别以白噪音波形、正弦波和方波作为路面干扰输入,通过比较被动悬架与PID控制的主动悬架
车身垂直速度、悬挂扰度、车身加速度等的比较,研究了PID控制对汽车行驶平顺性的影响。对加速度动态响应曲线进行对
比分析,结果表明车辆悬挂系统PID控制能有效地改善汽车的乘坐舒适性、操纵稳定性及安全性。
关键词:PID控制;MATLAB/Simulink;悬架系统;车身加速度;汽车平顺性
中图分类号:
U463.33
文献标识码:
A
文章编号:
1671-5799(2016)27-0297-04
引言
随着社会的发展及科学的进步,人们对汽车乘坐的舒适
性(即汽车的行驶平顺性)的要求越来越高。这就使得高速
行驶会使车辆振动问题变得更加突出,而传统的被动悬架无
法达到预期的性能要求。因此,整车振动特性的研究、新型
悬架的研发以及如何提高减振效果都是提升车辆整体性能
指标的主要方式。
然而通常使行驶中的车辆产生振动的主要因素是路面
或非路面的不平度。如果当这种振动达到一定的水平时,这
种振动会对车轮与路面之间的附着效果产生影响。振动会造
成轮胎与地面之间的动载荷增大,车身会发生振动与摇晃,
轮胎也会因为脱离地面而失去抓地力,这样会影响到车辆的
操纵性、行进时的安全性以及驾驶员与乘客的舒适性
[1]
。
汽车悬架系统的动态仿真对于改进悬架系统的设计,提
高汽车行驶的平顺性和安全性具有重要的意义。随着悬架系
统逐渐趋于复杂和对悬架系统方针的要求不断提高,传统的
利用微分方程和差分方程建模进行动态特性仿真的方法需
要大量的编程,工作量大、效率低,并且不能很好地满足仿
真需要。MATLAB中的Simulink工具箱可以方便地对悬架系
统的动态特性进行仿真
[2]
。
所以,从振动学与力学两个方面对车辆展开研究,寻找
一种能够根据路面情况主动调节参数的悬架把车身振动维
持在一个理想的范围之内,对提高车辆的驾驶性能、行驶时
的稳定与安全性能以及乘客的舒适性有着举足轻重的意义。
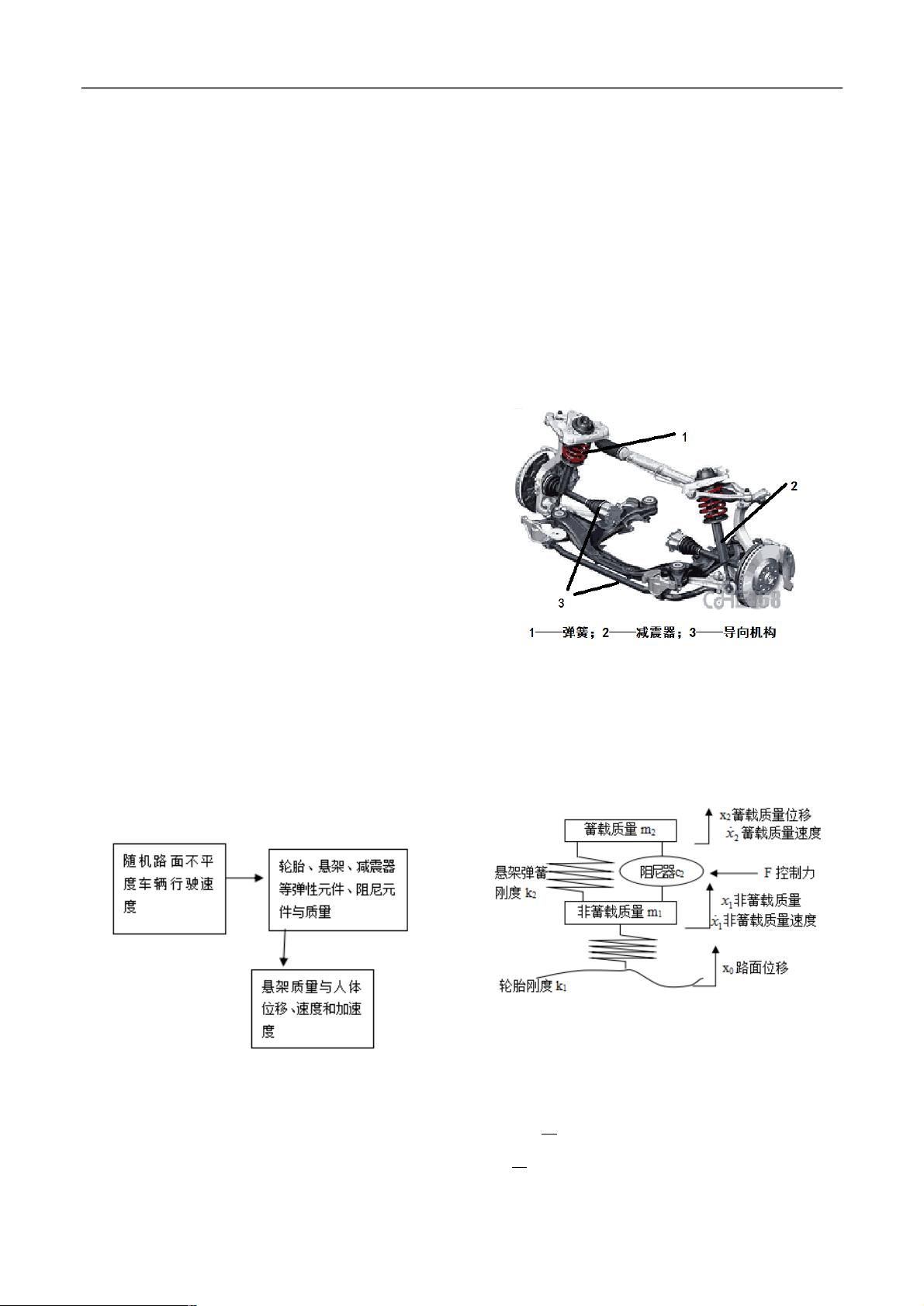
1 系统分析
汽车的行驶平顺性可由图1所示的汽车振动系统框图来
分析。系统的输入主要是汽车以一定速度行驶过的随机路面
不平度,该输入经过由轮胎、悬架、座椅、减震器和悬挂质
量、非悬挂质量所构成的振动系统传递到悬挂质量和人体,
悬挂质量和人体的加速度即为主要的输出量。
图1 汽车振动系统框图
现代汽车的悬架尽管有各种不同的结构形式,但一般都
是由弹性元件、减震器和导向机构三部分组成,如图2所示。
这三部分分别起到缓冲、减震和导向作用。悬架系统其实是
一个较为复杂的非线性、多自由度振动系统,要对悬架系统
进行动态分析,就必须搭建有效的系统模型。在进行悬架的
概念设计和控制理论研究时,2自由度1/4车辆悬架模型在
主动悬架研究中占据着非常重要的地位
[1]
。在悬架的控制策
略中,首先考虑的是车辆的通过性和乘坐的舒适性,而这种
模型能较好地体现车辆垂直振动的问题,这种非常简单的车
辆模型同样能够较为准确地体现车辆的基本形式特性。
图2 汽车悬架系统组成
2 悬架模型的建立与仿真
2.1 建立系统数学模型
为了简化起见,建立一个1/4汽车2自由度汽车模型进
行动态分析,如图3所示。其中忽略摩擦力、弹簧刚度的非
线性的影响。
图3 动态分析图
根据牛顿第二定律得出运动微分方程:
Fxxkxxcxxkxm
Fxxcxxkxm
)()()(
)()(
011
1
.
2
.
2122
1
..
1
1
.
2
.
2122
2
..
2
(式1)
动力学方程可变形为:
])()()([
1
])()([
1
011122
1
.
2
.
2
1
1
..
122
1
.
2
.
2
2
2
..
Fxxkxxkxxc
m
x
Fxxkxxc
m
x
(式2)
下载后可阅读完整内容,剩余3页未读,立即下载
175 浏览量
142 浏览量
点击了解资源详情
2023-11-01 上传
645 浏览量
2025-02-16 上传
121 浏览量
180 浏览量
131 浏览量

SKCQTGZX
- 粉丝: 130
 我的内容管理
展开
我的内容管理
展开







最新资源
- WebDrive v16.00.4368: 简易易用的Windows风格FTP工具
- FirexKit:Python的FireX库组件
- Labview登录界面设计与主界面跳转实现指南
- ASP.NET JS引用管理器:解决重复问题
- HTML5 canvas绘图技术源代码下载
- 昆仑通态嵌入版ASD操舵仪软件应用解析
- JavaScript实现最小公倍数和最大公约数算法
- C++中实现XML操作类的方法与应用
- 设计编程工具集:材料重量快速计算指南
- Fancybox:Jquery图片轮播幻灯弹窗插件推荐
- Splunk Fitbit:全方位分析您的活动与睡眠数据
- Emoji表情编码资源及数据库查询实现
- JavaScript实现图片编辑:截取、旋转、缩放功能详解
- QNMS系统架构与应用实践
- 微软高薪面试题解析:通向世界500强的挑战
- 绿色全屏大气园林设计企业整站源码与多技术项目资源
