
N. Barzegar
等人
医学信息学解锁
23
(
2021
)
100517
4
×
×
×
×
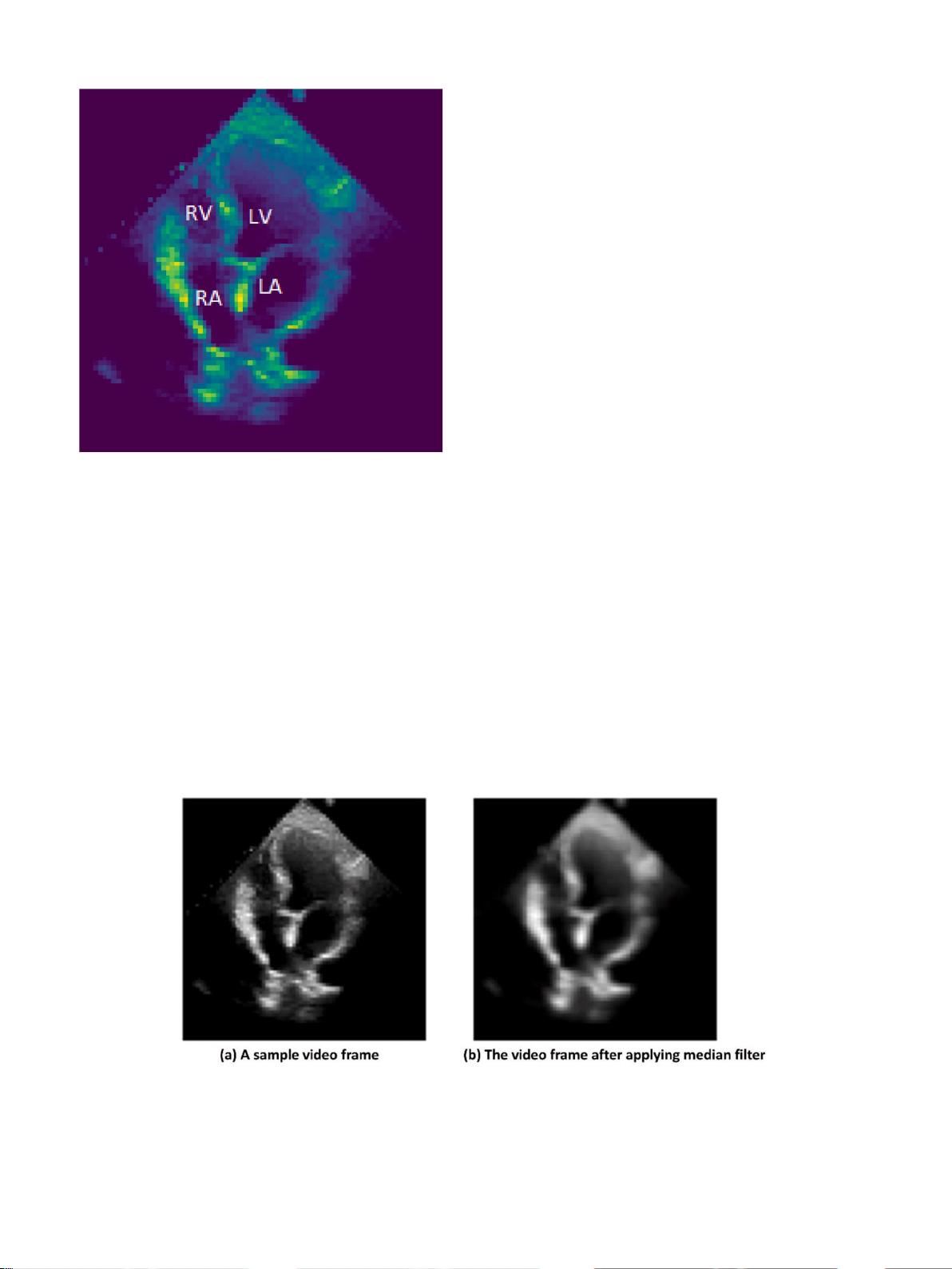
图二.
在2-D超声心动图视频的A4 C视图的视频帧中标记心腔。
绝对误差的平均值(MAE)和
R2
。
第二种情况和第一种情况的区别在于两个方面:
-
第二种方案提出了一种从连续视频帧
-
在第二种情况下设计和训练的CNN接受特征图作为其输入。特征图
(第二种情况下CNN的输入)是基于第二种情况下提出的方法提取
的
第三种场景与前两种场景的主要区别在于提取连续视频帧的运动历
史图像作为第三种场景中CNN
最后,最后一个场景与其他三个提到的场景相比有更多的步骤。经
过数据采集、数据预处理和准备、采样和数据增强这些所有场景中共有
的步骤,提取类似于第三种场景的运动历史图像。特征提取的执行类似
于第二种情况。CNN是基于在这种情况下生成的输入特征图来设计和训
练的。然后,评估和验证是
为我们所考虑的两个任务。
图1中所示的每个所提出的场景的步骤的更多细节在以下子部分中描
述
3.1.
心脏相位识别和
LAV
估计的第一个提议方案
如图1(a)所示的第一种场景包括数据收集、图像预处理和数据准
备、采样、数据扩充、设计和训练模型以及最后的评估和验证。这些步
骤在以下小节中有更详细的描述:
3.1.1.
数据收集
我们收集的数据集包括德黑兰心脏中心患者的2D超声心动图视频的
心尖四腔(A4C)视图。该数据集有621个A4C视图的视频。视频帧的分
辨率为768 × 1024像素。
专家已经确定了指示收缩末期和舒张末期心动周期阶段的关键视频
帧。并对每一关键帧估计了左心房的最大和最小容积。
图2确定2-D超声心动图视频中的A4 C视图的样本视频帧
如图2所示,在样本视频帧中,腔室被标记为右心房(RV)、左心房
(LV)、右心房(RA)和左心房(LA)。在这项研究中,我们的目的
是估计LA的体积
3.1.2.
图像预处理和数据准备
超声心动图视频的固有属性是它们倾向于作为颗粒干扰的斑点噪
声。散斑噪声降低了图像质量,给图像判读带来了困难。因此,需要对
超声心动图视频帧进行预处理,以便更好地诊断[34]。
为此,已经评估和使用了不同的非线性滤波器,例如中值滤波器。
在这项研究中,我们使用中值滤波平滑的核大小为3 3的视频帧,因为它
的简单和合理的结果在以前的研究。
图3指示超声心动图视频的样本视频帧及其通过应用具有核大小为3 ×
3的中值滤波器而创建的平滑版本。
此外,视频帧的大小调整为256 256像素,以减少训练模型的时间复
杂度和内存使用的负担。
3.1.3.
采样
K折交叉验证(C.V.)是一种常用的采样策略
图三.
(A)样本视频帧,以及(b)在应用中值滤波器之后其对应的平滑图像。
剩余16页未读,继续阅读

cpongm
- 粉丝: 5
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- C++标准程序库:权威指南
- Java解惑:奇数判断误区与改进方法
- C++编程必读:20种设计模式详解与实战
- LM3S8962微控制器数据手册
- 51单片机C语言实战教程:从入门到精通
- Spring3.0权威指南:JavaEE6实战
- Win32多线程程序设计详解
- Lucene2.9.1开发全攻略:从环境配置到索引创建
- 内存虚拟硬盘技术:提升电脑速度的秘密武器
- Java操作数据库:保存与显示图片到数据库及页面
- ISO14001:2004环境管理体系要求详解
- ShopExV4.8二次开发详解
- 企业形象与产品推广一站式网站建设技术方案揭秘
- Shopex二次开发:触发器与控制器重定向技术详解
- FPGA开发实战指南:创新设计与进阶技巧
- ShopExV4.8二次开发入门:解决升级问题与功能扩展
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


