西门子S7-200PID控制详解:从入门到精通
需积分: 10 19 浏览量
更新于2024-07-19
收藏 609KB PDF 举报
"西门子S7-200 PLC PID控制教程"
西门子S7-200系列PLC提供了强大的PID(比例-积分-微分)控制能力,允许用户构建复杂的闭环控制系统。PID控制是工业自动化领域中最常见的控制策略,它通过调整输出来减少设定值与实际值之间的偏差,确保系统的稳定性和准确性。
S7-200 CPU支持多达8个独立的PID控制回路,每个回路对应一个PID指令功能块。这些功能块依据设定值和实际反馈值的差值,基于PID算法计算出控制器的输出,进而影响执行机构的动作。PID控制器的工作原理是负反馈,即通过比较设定值和反馈值,产生一个修正信号来减小两者的差异。
PID算法由比例(P)、积分(I)和微分(D)三部分组成。在实际应用中,可能会根据需要选择使用其中的一部分,如PI控制(不使用微分)。在S7-200中,PID算法采用迭代方式计算,具体的计算过程可查阅《S7-200系统手册》中的PID指令部分。
在S7-200中,PID功能块的运行依赖于定时器,按照设定的采样时间执行。用户需要指定PID回路号和控制回路表的起始地址,这个表存储在V数据存储区内,长度为36字节。PID功能块需要的数据类型为0.0到1.0之间的实数,代表调节范围的百分比。
为了适应不同的控制对象,如温度、压力等,S7-200使用占调节范围的百分比来表示数值。这意味着需要将外部传感器提供的工程量转换为PID功能块能理解的格式。同样,PID功能块的输出也需要进行类似的转换,以驱动相应的执行机构。
PID的关键参数包括:Kc(增益),决定了对偏差的响应速度;Ti(积分时间常数),用于消除静差,防止系统振荡;Td(微分时间常数),有助于预测并提前补偿未来可能出现的偏差;Ts(采样时间),决定了PID算法的更新频率。
在编程时,必须确保输入和输出数据在0.0到1.0的范围内,否则可能会导致错误。因此,正确设置和调整这些参数至关重要,这通常需要根据系统的特性和期望的性能来进行精细调整。
掌握S7-200的PID控制是实现高效自动化控制的关键,需要理解PID的工作原理,熟悉其在S7-200系统中的实现方式,以及如何进行输入输出转换,才能有效地应用到实际工程中。
6
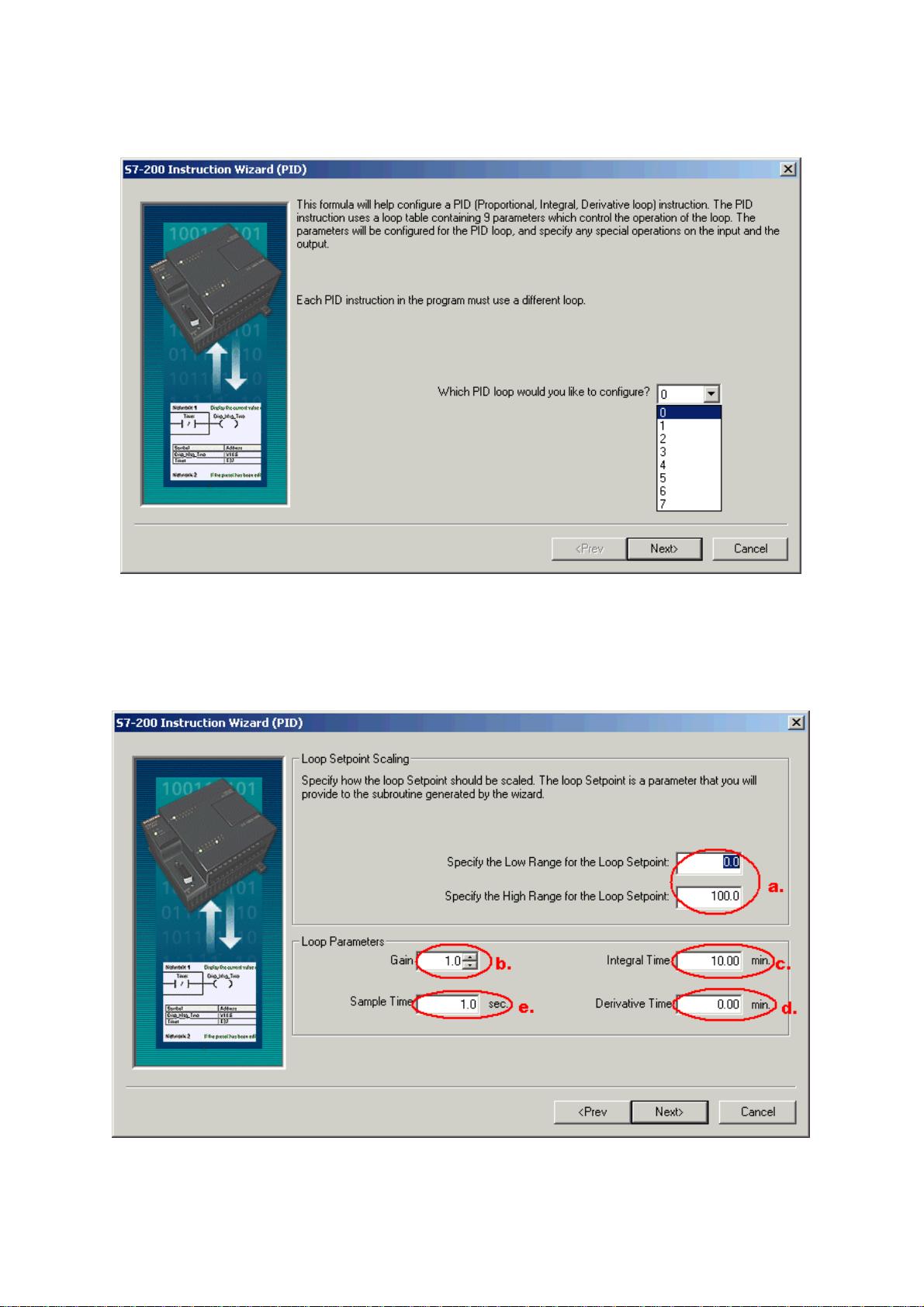
第一步:定义需要配置的 PID 回路号
图 3. 选择 PID 回路号
第二步:设定 PID 回路参数
图 4. 设置 PID 参数
剩余26页未读,继续阅读
2021-03-16 上传
2009-04-23 上传
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情

lbllss
- 粉丝: 0
- 资源: 3
 我的内容管理
展开
我的内容管理
展开







最新资源
- 探索数据转换实验平台在设备装置中的应用
- 使用git-log-to-tikz.py将Git日志转换为TIKZ图形
- 小栗子源码2.9.3版本发布
- 使用Tinder-Hack-Client实现Tinder API交互
- Android Studio新模板:个性化Material Design导航抽屉
- React API分页模块:数据获取与页面管理
- C语言实现顺序表的动态分配方法
- 光催化分解水产氢固溶体催化剂制备技术揭秘
- VS2013环境下tinyxml库的32位与64位编译指南
- 网易云歌词情感分析系统实现与架构
- React应用展示GitHub用户详细信息及项目分析
- LayUI2.1.6帮助文档API功能详解
- 全栈开发实现的chatgpt应用可打包小程序/H5/App
- C++实现顺序表的动态内存分配技术
- Java制作水果格斗游戏:策略与随机性的结合
- 基于若依框架的后台管理系统开发实例解析
