深度解析双目立体匹配算法:分类、评估与组件比较
本文是一篇关于密集双帧立体匹配算法的分类与评估的深入研究论文,由Daniel Scharstein和Richard Szeliski合作完成,他们分别来自微软研究部和 Middlebury College。论文的标题是"ATaxonomy and Evaluation of Dense Two-Frame Stereo Correspondence Algorithms",强调了在计算机视觉领域中,尽管已经发展出了众多立体匹配算法,但对这些算法性能的系统性分析相对较少。
作者们提出了一种针对密集双帧立体匹配方法的详细分类框架,旨在剖析不同算法中的关键组成部分和设计决策。通过这种分类体系,他们对现有的立体匹配方法进行了比较,并进行了实验评估,分析了各种变体的性能表现。为了建立一个通用的软件平台和便于评估的数据集,他们开发了一个独立、灵活的C++实现,这个平台可以单独评估各个组件,并易于扩展以接纳新的算法。
论文的核心内容包括:
1. **算法分类**:论文将立体匹配算法划分为几个主要类别,如区域匹配、特征匹配、成本-volume方法、光流法等,每个类别又细分为子类,根据它们如何处理像素级的匹配,如像素级比较、深度估计、纹理特征的使用等。
2. **性能评估**:作者设计了一套统一的评估标准,如精度(如错误率、精度地图)、鲁棒性(对光照、纹理变化的适应性)和计算效率,以便于客观衡量不同算法在实际场景中的效果。
3. **软件工具**:提供的C++库不仅用于比较,还作为一个开源工具,促进了学术界和工业界之间的交流,有助于后续研究者改进现有算法或开发新方法。
4. **数据集与基准**:论文中包含了精心设计的数据集,供研究人员用来测试和比较他们的算法,这对于算法的公平评价至关重要。
这篇论文为立体匹配算法的研究者提供了一个宝贵的参考框架,促进了算法设计的标准化和性能评估的可靠性,对于推动计算机视觉领域的研究和技术发展具有重要意义。
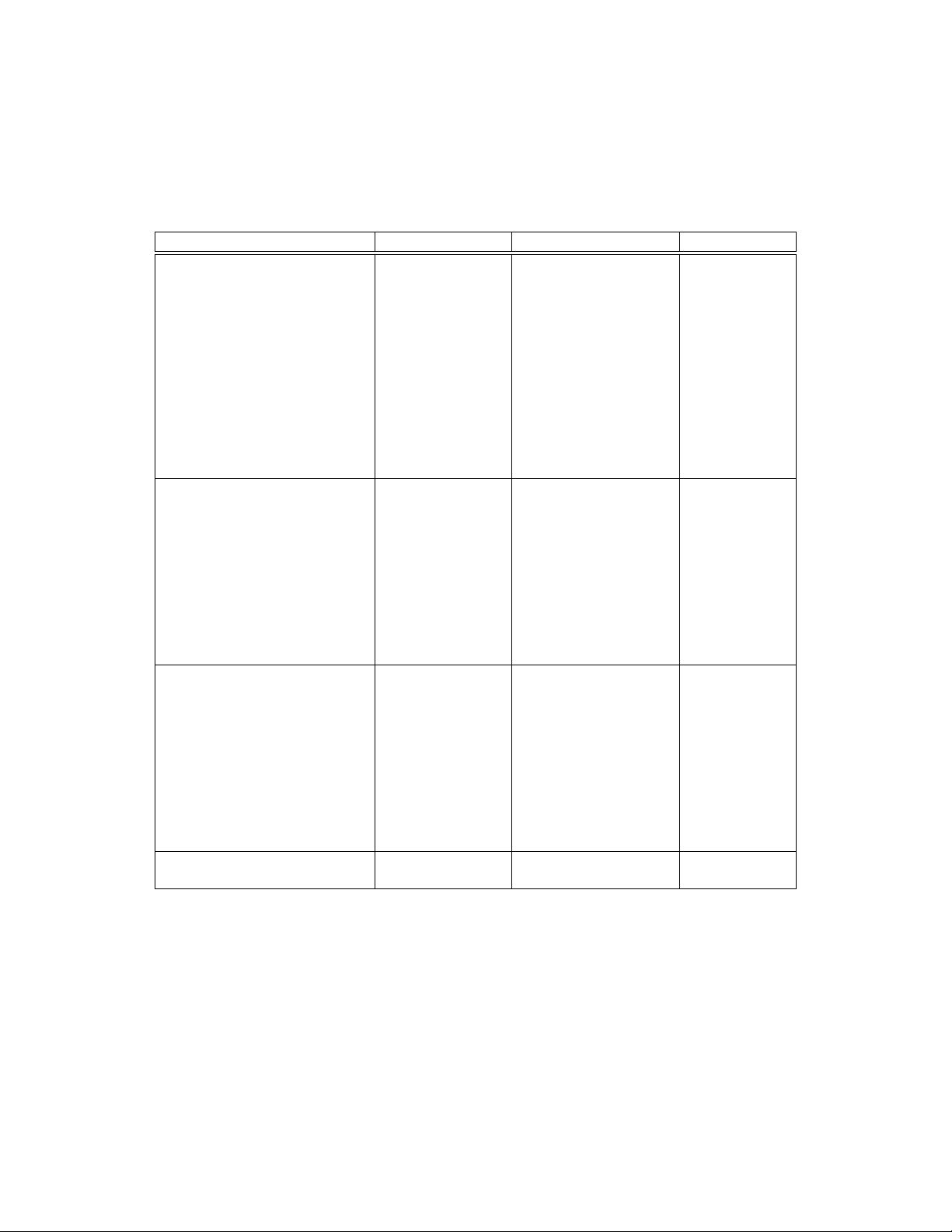
Method Matching cost Aggregation
Optimization
SSD (traditional) squared difference square window WTA
Hannah [51] cross-correlation (square window) WTA
Nishihara [82] binarized filters square window WTA
Kass [63] filter banks -none- WTA
Fleet et al. [40] phase -none- phase-matching
Jones and Malik [57] filter banks -none- WTA
Kanade [58] absolute difference square window WTA
Scharstein [95] gradient-based Gaussian WTA
Zabih and Woodfill [129] rank transform (square window) WTA
Cox et al. [32] histogram eq. -none- DP
Frohlinghaus and Buhmann [41]
wavelet phase -none- phase-matching
Birchfield and Tomasi [12] shifted abs. diff -none- DP
Marr and Poggio [73] binary images iterative aggregation WTA
Prazdny [89] binary images 3D aggregation WTA
Szeliski and Hinton [114] binary images iterative 3D aggregation WTA
Okutomi and Kanade [84] squared difference adaptive window
WTA
Yang et al. [127] cross-correlation non-linear filtering hier. WTA
Shah [103] squared difference non-linear diffusion regularization
Boykov et al. [22] thresh. abs. diff.
connected-component WTA
Scharstein and Szeliski [97] robust sq. diff. iterative 3D aggregation mean-field
Zitnick and Kanade [132] squared difference iterative aggregation WTA
Veksler [124]
abs. diff - avg. adaptive window WTA
Quam [90] cross-correlation
-none- hier. warp
Barnard [6] squared difference -none- SA
Geiger et al. [46] squared difference shiftable window DP
Belhumeur [9] squared difference -none- DP
Cox et al. [31]
squared difference -none- DP
Ishikawa and Geiger [55] squared difference -none- graph cut
Roy and Cox [92] squared difference -none- graph cut
Bobick and Intille [18] absolute difference shiftable window DP
Boykov et al. [23]
squared difference -none- graph cut
Kolmogorov and Zabih [65] squared difference -none- graph cut
Birchfield and Tomasi [14] shifted abs. diff. -none- GC + planes
Tao et al. [117] squared difference (color segmentation) WTA + regions
Table 1: Summary taxonomy of several dense two-frame stereo correspondence methods. The methods are grouped to contrast different
matching costs (top), aggregation methods (middle), and optimization techniques (third section). The last section lists some papers outside
our framework. Key to abbreviations: hier. – hierarchical (coarse-to-fine), WTA – winner-take-all, DP – dynamic programming, SA –
simulated annealing, GC – graph cut.
7
剩余34页未读,继续阅读
相关推荐




_guagua2222_
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- Ufrayd
- cstore_fdw:由Citus Data开发的用于使用Postgres进行分析的列式存储。 在https:groups.google.comforum#!forumcstore-users上查看邮件列表,或在https:slack.citusdata.com加入我们的Slack频道。
- 正则化算法
- monaco-powershell:VSCode的Monaco编辑器+ PowerShell编辑器服务!
- ASP网上购书管理系统(源代码+论文).zip
- node-provider-service
- Gradle插件可将APK发布到Google Play-Android开发
- Uecker
- 阿里云机器学习PAI-DSW入门指南.zip
- Cardboard-Viewer:主要使用Three.js,我为Google Cardboard耳机创建了一个陀螺移动VR查看器,以查看我在克利夫兰地区使用Panono 360相机拍摄的360°全景照片和风景。 刷新页面从总共6张照片中选择一张随机照片。 要查看该应用程序,请单击链接:
- Jwg3full.github.io
- 简单的C++串口示例
- 高斯白噪声matlab代码-SPA_for_LDPC:此存储库是关于LDPC(又名低密度奇偶校验)代码的和积算法在二进制对称信道,二进制擦除信
- C/C++:二叉排序树.rar(含完整注释)
- U27fog
- godotenv:Ruby的dotenv库的Go端口(从`.env`加载环境变量。)
