三角测量法详解:单点与线状激光测距原理
需积分: 0 156 浏览量
更新于2024-08-05
1
收藏 2.21MB PDF 举报
三角测量法是一种在计算机视觉和机器人技术中常见的三维空间定位技术,特别是在激光测距应用中。它基于光学原理,通过测量从光源到目标物体的光线路径,来推算出物体的距离。本文主要介绍了两种激光测距原理:单点激光测距和线状激光测距。
1. 单点激光测距原理:
单点激光测距是利用激光头发射出的单束激光,当激光照射到目标物体后反射回摄像头,通过摄像头的成像,可以构建一个类似三角形的几何关系。在这个过程中,激光头、摄像头和目标物体构成相似三角形,根据相似三角形的性质,我们可以计算出目标物体到摄像头的距离。关键的参数包括激光头与摄像头的水平距离s、摄像头的焦距f、激光头与基准线的夹角β,以及成像点的像素坐标position。通过这些参数,可以得出距离d的表达式。
2. 线状激光三角测距原理:
线状激光测距则涉及到光条的中心点P1和成像点P的成像问题。与单点不同,这种情况下形成的平面与基准面存在夹角θ,需要额外考虑焦距f'的变化。测量目标点P2与基准面的距离d'时,可以通过类似的方法,先计算出与基准面的夹角,然后利用焦距f'的关系来求解。公式中涉及的参数如P1'、P2'的坐标差和焦距的变换,都是计算的关键。
这两种方法都依赖于三角学的基本原理,尤其是相似三角形和正切函数,以及摄像头成像的几何特性。它们在无人机导航、机器人避障、3D建模等领域有广泛应用。理解并掌握这些原理,对于从事计算机视觉和机器人技术的开发人员来说至关重要,能够帮助他们实现精确的空间定位和环境感知。
首页 博客 学院 下载 图文课 论坛 APP 问答 商城 VIP会员 活动 招聘 ITeye GitChat
搜博主文章
写博客 赚零钱
原
三角测距法的原理
2017年09月04日 16:14:40 Lrisfish 阅读数:4510 标签: 三角测距 更多
• 单点激光测距原理
• 线状激光三角测距原理
单点激光测距原理
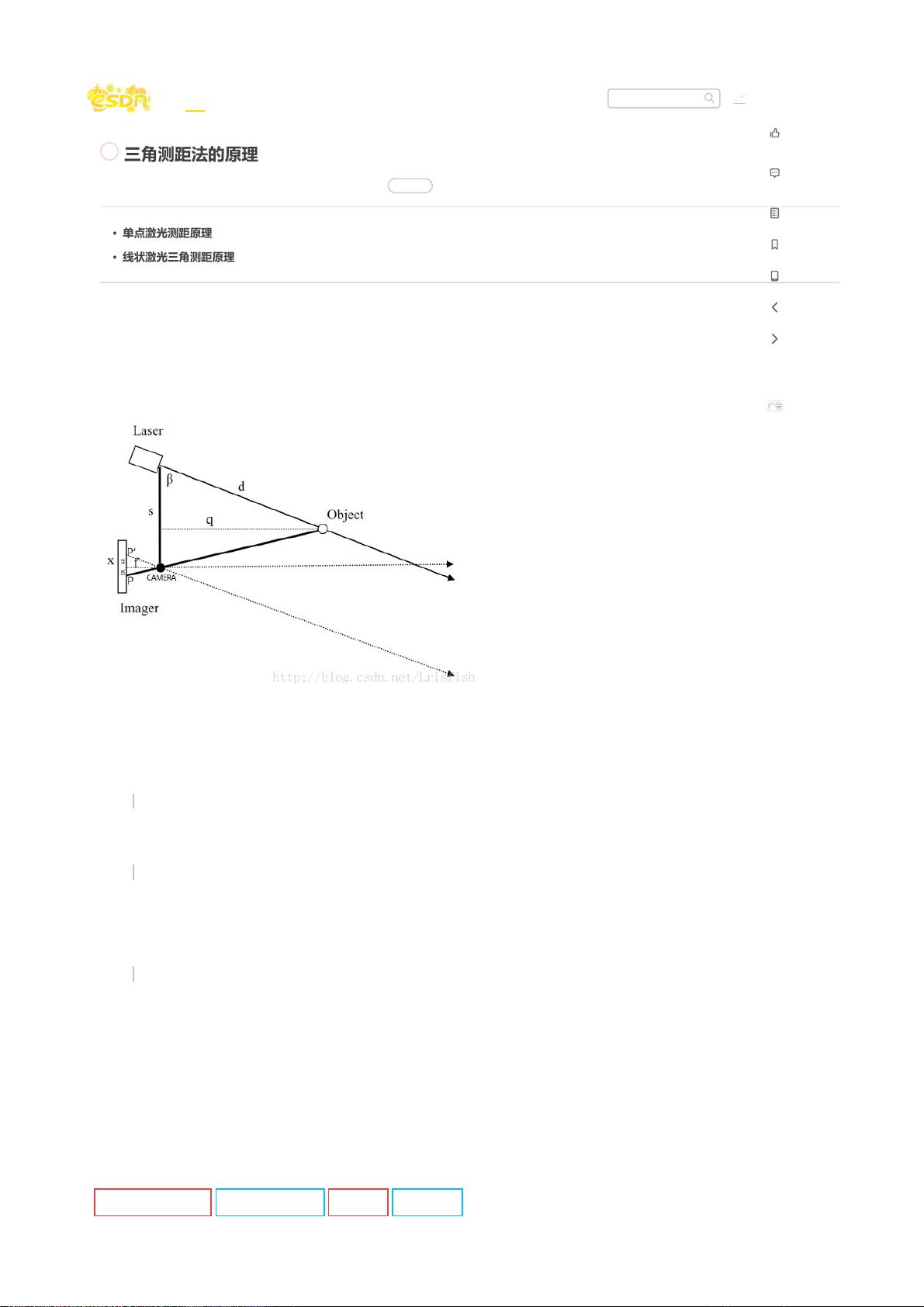
单点激光测距原理图如下图2-6所示,
图: 单点激光测距示意图
由几何知识可作相似三角形,激光头、摄像头与目标物体组成的三角形,相似于摄像头、成像点
设
可分为两部分计算:
其中pixelSize是像素单位大小, position是成像的像素坐标相对于成像中心的位置。
最后,可求得距离d:
激光头Laser与摄像头在同一水平线(称为基准线)上,其距离为s,摄像头焦距为f,激光头与基准线的夹角为β。
假设目标物体Object在点状激光器的照射下,反射回摄像头成像平面的位置为点P。
P与辅助点 。
P
′
P = x,q、d如图所示,则由相似三角形可得:
P
′
f/x=q/s ==> q=fs/x
1
X=x1+x2= f/tanβ + pixelSize* position
1
d=q/sinβ
1
2
2
2019人工智能前景解析 Python小白入门指导 数据库沙龙 春节充电计划
下载后可阅读完整内容,剩余7页未读,立即下载
2018-09-24 上传
2018-07-19 上传
109 浏览量
2024-07-09 上传
2023-07-28 上传
2023-03-30 上传
2023-07-07 上传
2024-07-31 上传
2023-06-08 上传

茶啊冲的小男孩
- 粉丝: 30
- 资源: 326
 我的内容管理
展开
我的内容管理
展开







最新资源
- Angular程序高效加载与展示海量Excel数据技巧
- Argos客户端开发流程及Vue配置指南
- 基于源码的PHP Webshell审查工具介绍
- Mina任务部署Rpush教程与实践指南
- 密歇根大学主题新标签页壁纸与多功能扩展
- Golang编程入门:基础代码学习教程
- Aplysia吸引子分析MATLAB代码套件解读
- 程序性竞争问题解决实践指南
- lyra: Rust语言实现的特征提取POC功能
- Chrome扩展:NBA全明星新标签壁纸
- 探索通用Lisp用户空间文件系统clufs_0.7
- dheap: Haxe实现的高效D-ary堆算法
- 利用BladeRF实现简易VNA频率响应分析工具
- 深度解析Amazon SQS在C#中的应用实践
- 正义联盟计划管理系统:udemy-heroes-demo-09
- JavaScript语法jsonpointer替代实现介绍
