欧姆龙NJ直线与圆弧插补实验详解及程序示例
版权申诉
欧姆龙NJ直线插补及圆弧插补实验是针对欧姆龙NJ系列的控制器进行的一项实践性操作,目标是通过实际编程实现空间多工位的运动控制。实验涉及的主要知识点包括:
1. 实验目的:
- 学习和应用NJ网络中的直线插补技术,用于驱动一组四个工位(工位1至工位4)的合成直线运动,每个工位坐标分别为(0,0)、(2000,2000)、(2000,0)和(0,0)。
- 掌握圆弧插补功能,能够根据提供的示例或自定义路径,设计出符合要求的运动轨迹。
2. 实验器材:
- NJ和G5伺服系统,以及伺服电机两套。
- E3ZM-V81模块,以及必要的网络连接设备(如网线)。
- 欧姆龙NJ系列的教材、操作手册和运动控制指令手册,这些都是理解和实施实验的关键参考资料。
3. 实验步骤:
- 轴设置:实验者需要预先设置好各个轴的原点返回方式,以及轴组的配置,确保轴组功能的正确启用。轴组的建立和操作设置涉及到轴组的最大插补速度、加速度等参数的设定。
- 程序编写:
- A. 准备程序:熟悉并运用基础指令,如MC_POWER和MC_HOME,以及轴组使能指令MC_GroupEnable和使能解除指令MC_GroupDisable。
- B. 实验程序:
- 直线插补:使用MC_MoveLinear指令,根据指定的起点和终点坐标,如(0,0)到(2000,2000),依次控制各工位运动,速度v设置为500。
- 圆弧插补:根据给定的运动轨迹设计程序,这可能涉及到使用欧姆龙提供的圆弧插补指令,如MC_MoveArc,以实现平滑的曲线运动。
4. 关键技术:
- 齿轮比设置:实验要求速度比为3比1,这可能涉及到MC_gearin和MC_gearout指令的使用,以调整伺服系统的速度和扭矩输出,实现不同的传动比。
5. 指导与参考资料:
- 实验过程中需在指导人员的指导下进行,确保理解并正确执行指令,同时查阅NJ操作手册和其他参考资料,解决遇到的问题。
通过这个实验,参与者不仅能提升欧姆龙NJ控制器的编程技能,还能加深对机械运动控制原理的理解,特别是在实际操作中如何利用各种指令来精确控制机器人的运动路径。
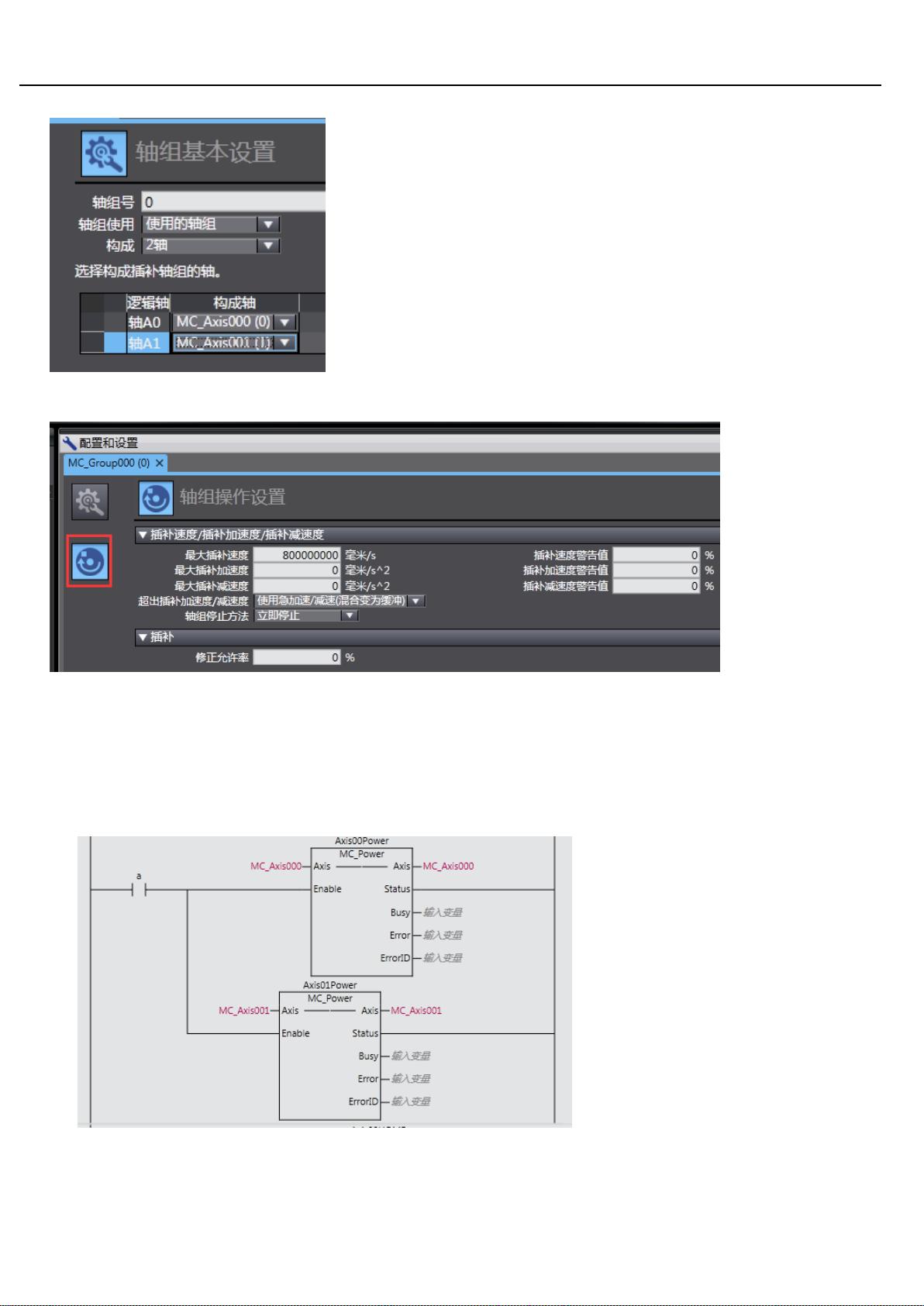
点击左侧“轴组操作设置”在下图中设置最大插补速度及加速度等,
轴设置完毕
3. 编写程序
A、准备程序程序
本次程序依然需要 MC_POWER 及 MC_HOME 指令由于与上次程序相同这里不多介绍,程序如下图:
剩余14页未读,继续阅读
2016-07-25 上传
2023-05-15 上传
2023-09-30 上传
2021-01-12 上传
2022-06-15 上传
2022-06-16 上传

卷积神经网络
- 粉丝: 359
- 资源: 8440
 我的内容管理
展开
我的内容管理
展开







最新资源
- 新型智能电加热器:触摸感应与自动温控技术
- 社区物流信息管理系统的毕业设计实现
- VB门诊管理系统设计与实现(附论文与源代码)
- 剪叉式高空作业平台稳定性研究与创新设计
- DAMA CDGA考试必备:真题模拟及章节重点解析
- TaskExplorer:全新升级的系统监控与任务管理工具
- 新型碎纸机进纸间隙调整技术解析
- 有腿移动机器人动作教学与技术存储介质的研究
- 基于遗传算法优化的RBF神经网络分析工具
- Visual Basic入门教程完整版PDF下载
- 海洋岸滩保洁与垃圾清运服务招标文件公示
- 触摸屏测量仪器与粘度测定方法
- PSO多目标优化问题求解代码详解
- 有机硅组合物及差异剥离纸或膜技术分析
- Win10快速关机技巧:去除关机阻止功能
- 创新打印机设计:速释打印头与压纸辊安装拆卸便捷性
